DYN3 - TSI Ljf.html

DYN Dynamique DYN-3 Liaisons non parfaites
Lycée Jules Ferry
Page 1 sur 9
TSI2
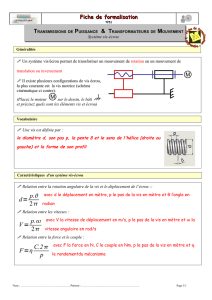
Certains composants mécaniques nécessitent la présence d'un frottement important pour fonctionner :
composants non réversibles du fait du frottement :
- transmission par adhérence voire frottement :
Les pertes par effet joules peuvent venir également de la déformation visco-élastique de certains matériaux
(courroie, pneumatique…).
Pour de tels composants, il est alors nécessaire de modéliser les pertes occasionnées par échauffement
afin d'obtenir des résultats proches de la réalité.
Analyser
Modéliser
Résoudre
Expérimenter
Concevoir
Réaliser
Communiquer
B1 Identifier et
caractériser les grandeurs physiques agissant sur un système
%
Savoirs faires associés
§
bilan
Qualifier les grandeurs d'entrée et de sortie d'un système isolé
Identifier les phénomènes dominants
Proposer des hypothèses simplificatrices en vue de la modélisation
1
B2 Proposer un modèle de connaissance et de comportement
%
Savoirs faires associés
§
bilan
Associer un modèle aux constituants d’une chaîne d’énergie
Proposer et justifier un modèle de liaison entre deux solides
Associer aux liaisons un torseur d’action mécanique transmissible et un torseur mécanique
Associer un modèle à une action mécanique
Ecrire la relation entre modèle local et modèle global dans le cas d’actions réparties
1
Analyser
Modéliser
Résoudre
Expérimenter
Concevoir
Ré
aliser
Communiquer
C2 Procéder à la mise en œuvre d'une démarche de résolution analytique
%
Savoirs faires associés
§
Exprimer les puissances extérieures et les inter
-
efforts
Déterminer les puissances échangées
Déterminer les énergies transmises ou stockées
1,
2
Cours
Cours
DYN
-
3
TSI1 TSI2
Théorème de la puissance cinétique
X
Période
Liaisons non parfaites
1
2 3
4 5
Cycle 1 :
Dynamique Durée :
9 semaines
X
Figure
1
: Roue vis non
réversible (petit pas de vis)
F
igure
2
: Vis
-
écrou
(sans bille au pas standard)
Figure
3
: Adhérence poulie
-
courroie, roue sur sol.
Figure
4
: Frottement roue
-
sol.

DYN Dynamique DYN-3 Liaisons non parfaites
Lycée Jules Ferry
Page 2 sur 9
TSI2
1 Contact ponctuel
Le contact ponctuel théorique ne se rencontre pas dans la nature car les pressions générées seraient
infinies (surface nulle). En pratique par rapport à l'échelle du problème, on peu assimiler un contact
surfacique (sensiblement plan) à un contact ponctuel.
Figure 5 : Gyropode (à l'échelle du système le contact entre une roue et le sol peut-être assimilé à un contact ponctuel)
Dans le cas d'un contact ponctuel le modèle de liaison non parfaite fréquemment utilisé est la modélisation
par les lois de Coulomb.
L'avantage de ce modèle est qu'il est indépendant de la surface de contact (comportement similaire que la
surface de contact soit un plan, une ligne ou un point).
1.1 Rappel des lois de Coulomb
Soient deux solides 1 et 2 en contact ponctuel en A.
Loi de Coulomb sur le frottement (avec glissement) pour un contact ponctuel en A:
•
avec
et
: les composantes de la résultante transmissible de 1 sur 2
o
: la composante due au frottement (dans le plan tangent au contact),
o
: la composante normale au contact de 1 sur 2 (dirigée de 1 vers 2).
o f = tan φ où φ est l'angle entre la normale au contact et la résultante de 1→2).
•
: la composante due au frottement s'oppose au déplacement
avec
: la vitesse de 2 par rapport à 1 en A,
et
(par définition de la tangente en A).
Loi de Coulomb sur l'adhérence(sans glissement) pour un contact ponctuel en A:
•
avec
et
: les composantes de la résultante transmissible de 1 sur 2
o
: la composante due au frottement (dans le plan tangent au contact),
o
: la composante normale au contact de 1 sur 2 (dirigée de 1 vers 2).
o fa = tan φ
a
où φ
a
est l'angle maximum entre la normale au contact et la résultante de 1 sur
2).
•
: la composante due au frottement s'oppose au déplacement qui tend à être provoqué
(s'obtient par application du PFD).
A
1
2
Figure
6
: Loi de Coulomb du frottement
Figure
7
: Loi de Coulomb de l'adhérence
φ
a
φ

DYN Dynamique DYN-3 Liaisons non parfaites
Lycée Jules Ferry
Page 3 sur 9
TSI2
Hypothèses et limitations du modèle :
- les valeurs de f et fa sont proches et on assimile souvent ces 2 coefficients.
- les lois de Coulomb supposent que le coefficient de frottement est constant quelle que soit
l'intensité de la composante
, ce qui est simplificateur.
- enfin le coefficient de frottement est souvent donné pour un couple de matériaux (acier-bronze par
exemple) mais il dépend également de la rugosité, de la lubrification, de la vitesse au contact, de la
durée d'application de la charge…
En d'autre terme un essai préalable dans les conditions de fonctionnement s'impose si l'on souhaite
améliorer la fiabilité des résultats, mais les lois de Coulomb permettent néanmoins de fixer l'ordre de
grandeurs des actions en jeux.
1.2 Puissances dans le cas d'un contact ponctuel en A
Dans le cas d'une puissance extérieure au système isolé, on utilisera la même formule que pour une liaison
sans frottement en A :
!"
#$%
&'
()
*
(frottement par les lois de Coulomb et moment transmissible nul au contact en A)
Dans le cas d'une puissance intérieure au système, on obtient après modélisation par les lois de Coulomb:
+
!"
#%
)
*
,%
)
*
La puissance intérieure pour un contact ponctuel est donc nulle dans 2 cas :
• liaison parfaite -
.
,
• roulement sans glissement au point de contact entre 1 et 2 : /
0
..
1.3 Généralisation à d'autres contacts
Modèle global de l'action de contact surfacique
Les lois de Coulomb peuvent s'appliquer à d'autres contacts que le contact ponctuel par intégration sur
toute la surface de contact (dans le cas du glissement) :
-
1
2
3
2
4
5
67
,89
$
:
(
&;<=
$
:
(
>?@
A
B
6
*:
7
,89
$
:
(
&;<=
$
:
(
>?@
A
C
2
D
2
E
0
avec A : un point quelconque et M un point de la ligne de contact,
FF(M): la pression de contact en M (en N/m²),
G
$H(
: normale unitaire au point M dirigée vers l'extérieur de 2,
f : coefficient de frottement,
I
$H(
: le vecteur unitaire orienté dans le sens opposé au glissement de 2/1,
JK : une surface élémentaire (en m²) de la surface total de contact S(en m²).
Le calcul des puissances dépend alors des formes en contact et donc des mobilités présentes.

DYN Dynamique DYN-3 Liaisons non parfaites
Lycée Jules Ferry
Page 4 sur 9
TSI2
Modèle global de l'action de contact linéique:
On peut alors déterminer le torseur de l'action de 1 sur 2 (dans le cas du glissement) :
-
L 5
M
,N9
$
:
(
&;N=
$
:
(
JO
P
B
M
*:
$,N9
$:(
&;N=
$
:
(
(
?Q
P
R
0
avec A : un point quelconque et M un point de la ligne de contact,
SS(M): la charge linéique de contact en M (en N/m),
G
$H(
: normale unitaire au point M dirigée vers l'extérieur de 2,
f : coefficient de frottement,
I
$H(
: le vecteur unitaire orienté dans le sens opposé au glissement de 2/1,
JO : une longueur élémentaire (en m) de la longueur total du contact L(en m).
2 Rendements
Les pertes par frottement dans certains mécanismes (engrenages, pompes,…) sont complexes à
modéliser même à partir des lois de Coulomb.
Dans ce cas, on utilisera la notion de rendement pour quantifier les pertes par échauffement en régime
permanent.
2.1 Rendement d'un système:
TU
V
WV
XYX
U
Z
X
avec [ le rendement du mécanisme [\,
]
^_^`
: la puissance disponible en sortie de valeur absolue Ps
]
a_a`
: la puissance fournie à l'entrée de valeur absolue Pe
Hypothèses et limitations du modèle par rendement :
Pour les résolutions analytiques, on suppose souvent que le rendement d'un composant est constant. En
pratique ce rendement dépend de l'intensité des actions mécaniques transmises, des vitesses relatives
entre composants, de la température de fonctionnement,…
Enfin cette modélisation n'est pas adaptée lorsque les termes inertiels en régime non permanent ne sont
pas négligeables car le rendement dépend alors des accélérations du système.
2.2 Puissance intérieure à partir du rendement
La puissance intérieure au mécanisme perdue par frottement est donc définie par l'écart entre la puissance
de sortie et la puissance d'entrée : ]
bcd
]K,]e.
On peut exprimer cette puissance en régime permanent par :
- à partir de la puissance en entrée :
f9=
X$T,(
(avec ]eg. ici par définition)
- à partir de la puissance en sortie :
f9=
Z$,
T
(
(avec ]Kg. ici par définition)

DYN Dynamique DYN-3 Liaisons non parfaites
Lycée Jules Ferry
Page 5 sur 9
TSI2
Les relations précédentes sont vraies en régime permanent ou pour des inerties négligeables, mais sont
parfois proposées ainsi dans les sujets pour des régimes non permanents (accélérations non nulles).
En toute rigueur, il faudrait écrire en régime non permanent pour un étage de réduction :
]
bcd
$]e,h
i
jk
i
j
i
($[,\(
avec ]
bcd
: puissance dissipée au niveau des dents d'engrenage (en W),
]
a
: puissance fournie à l'entrée du réducteur (en W),
h
i
: moment d'inertie de l'arbre moteur depuis l'entrée jusqu'à la denture de l'engrenage (en kg.m²),
j
i
: vitesse de rotation de l'arbre moteur (en rad/s),
[ : rendement du mécanisme [\.
2.3 Modélisation du contact vis-écrou
Le contact avec frottement entre la vis et l'écrou est particulier car son rendement (souvent faible) et ses
conditions de réversibilité peuvent être définis analytiquement.
Système non réversible
: si la motorisation peut entrainer la charge mais que la charge ne peut
pas entrainer la motorisation.
1) Paramètres géométriques
Figure 8 : vis-écrou à contact directe (irréversible) ou à billes (meilleur rendement)
Pas p : distance parcourue par l’écrou pour un tour de vis.
Diamètre D: diamètre nominale de la vis (ordre de grandeur p=D/4).
Attention :
Le pas réel (hélicoïdal) p dépend du nombre n de filets
p= n.p
p
p
p
: pas du profil
Vis à n=1, 2, 4 ou 6 filets
Vis à billes : pas de 5 et 10 mm pour un filet
pas de 20 et 40 pour 4 filets
Afin de modéliser le contact on développe l'hélice (en la déroulant à plat) :
p
p
p
p
p
π
.D
β
β
 6
7
8
9
6
7
8
9
1
/
9
100%