Dispositif anti excès de vitesse

Un robot pour les ralentir tous !
Un dispositif contre les excès de vitesse

1
Chapitre 1 : Introduction ______________________________________________________________ 3
Chapitre 2 : Le « RomeoBot », notre prototype. ___________________________________________ 4
Contraintes techniques inhérentes à notre prototype ___________________________________________ 4
Description fonctionnelle du robot __________________________________________________________ 4
Détail des composants importants ___________________________________________________________ 4
L’évolution du robot. ______________________________________________________________________ 5
Chapitre 3 : La RFID : _________________________________________________________________ 6
Généralités. _____________________________________________________________________________ 6
Un point d’histoire. _______________________________________________________________________ 6
De multiples applications. __________________________________________________________________ 6
Chapitre 4 : Le Transpondeur __________________________________________________________ 7
Généralités______________________________________________________________________________ 7
Alimentation du transpondeur ______________________________________________________________ 8
Émission de l’information _________________________________________________________________ 12
Chapitre 5 : Transmission de l’information par ondes électromagnétiques ____________________ 13
Généralités. ____________________________________________________________________________ 13
La modulation d’amplitude ________________________________________________________________ 14
Chapitre 6 : L’effet transformateur ____________________________________________________ 15
Principe physique. _______________________________________________________________________ 15
Rapide historique _______________________________________________________________________ 15
Généralités_____________________________________________________________________________ 15
Chapitre 7 : La démodulation _________________________________________________________ 19
Principe global. _________________________________________________________________________ 19
Supprimer la composante négative du signal. _________________________________________________ 19
Retrouver l’enveloppe : le détecteur de crête. ________________________________________________ 19
« Linéariser » l’enveloppe : Le comparateur. __________________________________________________ 21
Conclusion ________________________________________________________________________ 22
De la modulation à la RFID. ________________________________________________________________ 22
Application du projet. ____________________________________________________________________ 23

2
Remerciements
Nous tenions à remercier Mme MORENO, professeure de Physique Chimie, et M. LACOMBE, professeur de
Sciences de l’Ingénieur, qui pendant deux ans nous ont encadrés, accompagnés et nous ont permis de tenter ces
aventures qu’auront été les concours « C Génial » et les « Olympiades de Physique ».
Nous remercions également M. BRAHMI, professeur de Sciences Économiques et Sociales ainsi que Mme.
DALL’ERTA, C.P.E. (Conseillère principale d’éducation) pour leur travail dans l’entreprise du projet « Lycéens
contre la violence routière » qui a constitué la base de notre projet en nous sensibilisant aux problématiques de
la sécurité routière.
Nous tenons également à remercier Mme BRUYAS et M. VERRIEST, chercheurs à l’Institut Français des
Sciences et Technologies des Transports et des Aménagements Routiers (IFFSTAR) et M. MUGNIER, directeur de
la prévention routière de l’Ain pour leurs précieux conseils tout au long du projet.
Nous remercions enfin l’organisme des « Olympiades de Physique » pour cette opportunité de mener à bien nos
projets.
Elèves au lycée de la Côtière, nous avons eu la possibilité l’an dernier d’inscrire
nos Travaux Personnels Encadrés dans le cadre d’une réflexion opportune
sur le thème de la sécurité routière.
Comme la vitesse est un facteur déterminant dans la gravité des accidents
sur la route, nous avons décidé de créer un système capable d’afficher en
permanence la vitesse limite dans le véhicule voire de brider celle-ci.
Pour cela, nous avons utilisé une technique en plein essor, la RFID, qui repose
sur une communication par radiofréquences.
Nous vous proposons un tour d’horizon des principes physiques qu’un tel
système met en jeu :
la modulation d’amplitude, l’induction électromagnétique,
la résonnance, l’effet transformateur, etc.
Enzo Castillo et Ambroise Poulet--Tomasicchio

Chapitre 1 : Introduction
3
Chapitre 1 : Introduction
Le premier enjeu de nos travaux a été la sécurité routière, et plus particulièrement la vitesse. En effet, la
vitesse est l’un des 3 principaux facteurs de mortalité sur nos routes. Elle a une incidence multiple sur la gravité des
accidents.
A mesure que le conducteur accélère, son champ de vision diminue, allant de 180° jusqu’à 30° à 130 km/h.
De plus la distance d’arrêt du véhicule augmente, en proportion de la distance parcourue durant le temps de
réaction. Le plus influent cependant dans la mortalité routière est l’augmentation de la violence du choc,
proportionnelle au carré de la vitesse du véhicule, selon la formule de l’énergie cinétique ci-dessous :
Forts de ces constats, nous nous sommes interrogés sur
le « pourquoi ». C’est ce qui nous a menés à formuler
notre premier objet d’étude : « comment informer le
conducteur des limitations de vitesse ? ». En effet le
conducteur commet souvent des dépassements de
vitesse lorsqu’il oublie les limitations de vitesse. Mais il
y a aussi des conducteurs pressés, ou inconscients. Des
personnes dangereuses par leur « non-information »,
ou même des délinquants routiers.
C’est pour ces personnes là que nous avons fait évoluer notre projet jusqu’à énoncer la problématique suivante :
« Comment réguler automatiquement la vitesse du véhicule en fonction des limitations en vigueur et en
informer en permanence le conducteur ? »
Pour cela nous avons conçu un système capable de reconnaître les limitations de vitesse grâce à un repérage
sous la route, par RFID (Radio Frequency Identification).
Nous avons modélisé la voiture par un robot fonctionnant sous Arduino, et l’avons muni d’un module de
lecture RFID. A chaque « transpondeur » présent sous la route correspond un panneau – une donnée de vitesse,
contenue dans un code qui lui est propre. Au passage du robot, le transpondeur lui délivre l’information de
limitation de vitesse.
Cela permet de créer une communication entre le « Panneau » (modélisé par les transpondeurs ) et le
« Véhicule » (modélisé par le robot).
Nous n’avions plus qu’à programmer le robot, pour qu’à chaque code reçu il limite sa vitesse en fonction, et
affiche le panneau correspondant sur un écran dédié à l’information de l’utilisateur. Dans notre programme, nous
avons récupéré chacun des codes des transpondeurs et les avons associés à une limitation de vitesse.
Ainsi les transpondeurs modélisent bien les panneaux de limitation de vitesse, et le robot réagit en fonction de
l’information détectée : nous avons pu atteindre nos objectifs mais… Comment ça marche ?
E : L’énergie cinétique du véhicule.
(proportionnelle à la violence du choc).
m : La masse du véhicule.
v : La vitesse du véhicule.
Variation de l’énergie délivrée durant le
choc en fonction de la vitesse.

Chapitre 2 : Le « RoméoBot », notre prototype.
4
Chapitre 2 : Le « RomeoBot », notre prototype.
Contraintes techniques inhérentes à notre prototype
Avant de commencer sa construction, nous nous sommes interrogés sur la façon dont nous pouvions
contrôler le déplacement du robot modélisant notre véhicule. Nous devions être certains qu’il ne tombe pas de
son support et qu’il rencontre tous les transpondeurs situés sur son passage.
Pour cela nous avons créé une maquette sur lequel le robot peut se déplacer entre 2 lignes blanches
modélisant une voie de circulation. A l’aide de capteurs infrarouges, le robot reste sur la voie sous laquelle nous
avons enfoui les transpondeurs. Pour indiquer l’emplacement des transpondeurs nous avons fait des panneaux
indicateurs de vitesse.
Description fonctionnelle du robot
Afin de décrire notre prototype de manière efficace et succincte, nous avons opté pour le modèle des
chaines d’information et d’énergie : vous pourrez trouver ces deux diagrammes en annexe 1.
Détail des composants importants
Notre prototype se compose de deux grandes parties : le suivi de ligne, et la gestion des panneaux de
signalisation.
La gestion du suivi de ligne :
Elle se fait autour de 4 principales parties : la base robotique sur laquelle nous avons
construit notre robot ; une carte Arduino programmable qui permet la gestion des moteurs ;
les capteurs de ligne blanche avant qui permettent le suivi du circuit ; les capteurs « anti-
chute » arrière qui évitent au robot de tomber lorsqu’il recule.
1. La base robotique
Elle est composée d’une structure métallique, de deux motoréducteurs à courant continu,
de deux roues motrices ainsi que d’une roue jockey à l’avant et d’une batterie 7,4 Volts. C’est elle qui nous servira
de base pour placer tous nos composants.
2. La carte Arduino Roméo.
Nous utilisons pour gérer les motoréducteurs une carte Arduino Romeo v1.0,
commercialisée par DFRobot. L’Arduino est un circuit imprimé libre de droits
programmable au moyen d’une interface et d’un langage dédié, proche du C++. La carte
Arduino la plus connue est la Uno, néanmoins nous utiliserons ici la variante Romeo
spécialement dédiée à la robotique. Cette carte équipée d’un contrôleur ATMega 328 sera
les « jambes » de notre robot en lui permettant de suivre le circuit, et réaliser les
différentes actions qui lui seront demandées par la seconde carte Arduino, elle réservée à
la gestion des panneaux.
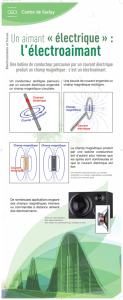
3. Les capteurs de ligne blanche avant.
Ce sont des capteurs infrarouge ayant ont une longue portée (80
centimètres), et qui, orientés vers l’extérieur, permettent au robot
d’être très réactif aux changements de trajectoire. Ils renvoient des
valeurs logiques : 0 pour « noir » et 1 pour « blanc ». Ainsi, lorsque le
robot détecte « du blanc » à droite, il tourne à gauche, et
inversement. Lorsqu’il ne détecte que « du blanc », il s’arrête.
4. Les capteurs « anti-chute » arrière.
Ce sont également des capteurs infrarouges mais de portée réduite. Ils fonctionnent donc sur le même
principe mais ne servent qu’à éviter que le robot chute lorsqu’il manœuvre.
Capteurs de ligne
Gauche et Droite
 6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
1
/
24
100%