PyPHS: Un module Python pour la modélisation et la

,pdfauthor=Antoine Falaize, Thomas H´elie, Tristan Lebrun,pdfkeywords=Syst`emes
hamiltoniens `a ports, M´ethode num´erique, Analyse de graphes, G´en´eration
de code,pdfcreator=HAL,pdfproducer=PDFLaTeX,pdfsubject=Physics [physics]/Physics
[physics]/Computational Physics [physics.comp-ph], Mathematics [math]/Numerical
Analysis [math.NA], Mathematics [math]/Mathematical Physics [math-ph],
Mathematics [math]/Dynamical Systems [math.DS]
PyPHS: Un module Python pour la mod´elisation et la
simulation `a passivit{´e garantie de syst`emes multi-physiques
Antoine Falaize, Thomas H´elie, Tristan Lebrun
To cite this version:
Antoine Falaize, Thomas H´elie, Tristan Lebrun. PyPHS: Un module Python pour la
mod´elisation et la simulation `a passivit{´e garantie de syst`emes multi-physiques. Journ´ees Je-
unes Chercheurs en Audition, Acoustique musicale et Signal audio, Nov 2016, Paris, France.
<https://intranet.sfa.asso.fr/archives/J93-JJCAAS2016/>.<hal-01470954>
HAL Id: hal-01470954
https://hal.archives-ouvertes.fr/hal-01470954
Submitted on 18 Feb 2017
HAL is a multi-disciplinary open access
archive for the deposit and dissemination of sci-
entific research documents, whether they are pub-
lished or not. The documents may come from
teaching and research institutions in France or
abroad, or from public or private research centers.
L’archive ouverte pluridisciplinaire HAL, est
destin´ee au d´epˆot et `a la diffusion de documents
scientifiques de niveau recherche, publi´es ou non,
´emanant des ´etablissements d’enseignement et de
recherche fran¸cais ou ´etrangers, des laboratoires
publics ou priv´es.


PyPHS:
Un module Python pour la mod´
elisation et la
simulation `
a passivit´
e garantie de syst`
emes
multi-physiques
Antoine Falaize, Thomas H´elie, Tristan Lebrun
Project-team S3 (Sound Signals and Systems)
UMR 9912 (IRCAM-CNRS-UPMC)
Motivations
Constat:
Les syst`emes physiques v´erifient un bilan
de puissance:
dE
dt=−PD−PS
Objectif:
Mod´eliser et simuler en pr´eservant cette
propri´et´e.
Approche:
Les Syst`emes Hamiltoniens `a Ports
I. Syst`
eme Hamiltonien `
a Ports [1]
nEComposants stockants :
•´
Etat x∈RnE
•E=H(x) = PnE
n=1 Hn(xn)≥0
•dE
dt=∇H|dx
dt=PnE
n=1
dHn
dxn
dxn
dt
nDComposants dissipatifs :
•Variable w∈RnD
•Fonction z:RnD→RnD
•PD=w|z=PnD
n=1 wnzn≥0
nSSources externes :
•Entr´ee u, sortie y
•PS=y|u=PnS
n=1 ynun
Interconnexion conservative :
•Puissance re¸cue:P=f e
•flux fet effort e(elec: f≡i,e≡υ)
•N=nE+nD+nS
•PN
n=1 Pn=PN
n=1 fnen= 0
Repr´esentation d’´etat
dx
dt
w
y
| {z }
b
=
Jx−KGx
K|JwGx
−Gx|−Gw|Jy
| {z }
J=−J|
∇H(x)
z(w)
u
| {z }
a
Encode le bilan de puissance
dE
dt+PD+PS=∇H|dx
dt+z(w)|w+u|y
=a|b
=a|Ja= 0,(Jantisym.).
Syst`eme passif
•entr´ee u/´etat x/contrainte w/sortie y.
•´
Energie H≡Fonction de Lyapunov (stabil-
it´e/contrˆole).
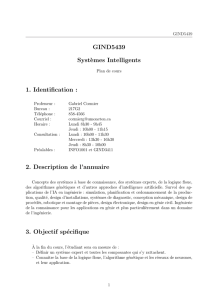
Exemple
Oscillateur amorti excit´e par une force
Graphe associ´e
Dictionnaire
Var. Fonction Flux Effort
mx1=m˙q H1=x2
1
2mv1=dH1
dx1F1=dx1
dt
kx2=q H2=k
2x2
2v2=dx2
dtF2=dH2
dx2
aw3= ˙q z3=Aw3v3=w3F3=z3
In v4=y4F4=u4
Netlist
mechanics.mass M (’n1’,’n2’): M=(’M’,0.1);
mechanics.stiffness K (’n2’,’n3’): K=(’K’,1e6);
mechanics.damper A (’n3’,’ref’): A=(’A’,1);
mechanics.source IN (’ref’,’n1’): type=’force’;
Structure retourn´ee par PyPHS
F1
v2
v3
v4
| {z }
b
=
0−1−1 1
1 0 0 0
1 0 0 0
−1 0 0 0
| {z }
J
v1
F2
F3
F4
| {z }
a
III. M´
ethode num´
erique [3]
Objectif: Garantir un bilan de puissance `a
temps discret:
δE
δT [k] = P[k]−D[k].
Choix:
δE[k]
δT =E[k+1]−E[k]
δT =H(x[k+1])−H(x[k])
δT
Une Solution:gradient discret [?]
dx
dt−→ δx[k]
δT =x[k+1]−x[k]
δT
∇H(x)−→ ∇dHx[k], δx[k]
avec
∇dHx, δxn=Hn[x+δx]n−Hn[x]n
[δx]n
.
⇒bilan de puissance discret avec
δE
δT [k] = ∇dH|x[k], δx[k]|δx[k]
δT
II. Analyse du graphe [2]
Objectif : G´en´erer le syst`eme d’´equations.
1. Graphe →Matrice d’incidence r´eduite Γ:
[Γ]n,b=1si la branche bentre le noeud n,
−1si la branche bsort du noeud n.
2. Γ →Lois de Kirchhoff g´en´eralis´ees:
•Potentiels sur les noeuds p∈RnN.
•R´ef´erence N0arbitraire.
•Γ|p=e,(Loi des mailles).
•Γf= 0,(Loi des noeuds).
3. S´eparation suivant le type de contrˆole
Γ = γ0
γeγf•γ0: r´ef´erence,
•γe: effort-ctrl,
•γf: flux-ctrl.
4. Crit`ere de r´ealisabilit´e:
Forme b=J·apossible si γfinversible.
Question: Quel contrˆole pour les composants
dissipatifs bijectifs?
Algorithme:
Donn´ees:
Netlist et dictionnaire de composants.
R´esultat
•Si r´ealisable:
1. partition de Γ,
2. structure b=J·a.
•Sinon: d´etection des conflits.
Dictionnaire actuel
M´ecanique (1D): masses,ressorts lin./nonlin.
(cubique, saturants, etc.),amortisse-
ments lin./nonlin.,visco-´elasticit´e (d´eriva-
teur fractionnaire).
´electronique: piles,bobines et condensa-
teurs lin./nonlin.,r´esistances,transistors,
diodes,triodes.
Magn´etique: Aimants,capacit´es magn´etiques
lin./nonlin,r˜
Al’sisto-inductance (int´egra-
teurs fractionnaires).
Thermique: sources de chaleur,capacit´es ther-
miques.
Connections: couplages ´electromagn´etiques,
couplages ´electrom´ecaniques,transferts
irr´eversibles,gyrateurs,transformateurs.
Conclusions
PyPHS: https://afalaize.github.io/pyphs/
•Licence CeCILL (CEA-CNRS-INRIA).
•Python 2.7 support´e sous Mac OSX,
Windows 10 et Linux.
Perspectives R´esultats disponible `a impl´e-
menter: variables d’ondes aller/retour, m´ethodes
num´eriques d’ordre sup´erieur, r´esolution des con-
flits de r´ealisabilit´e, g´en´eration de lois de com-
mandes (approche par platitude).
R´
ef´
erences
[1] Duindam, V., Macchelli, A., Stramigioli, S., & Bruyn-
inckx, H. (Eds.). (2009). Modeling and control of
complex physical systems: the port-Hamiltonian ap-
proach. Springer Science & Business Media.
[2] Falaize, A., & H´elie, T. (2016). Passive Guaran-
teed Simulation of Analog Audio Circuits: A Port-
Hamiltonian Approach. Applied Sciences, 6(10), 273.
[3] Lopes, N., H´elie, T., & Falaize, A. (2015). Explicit
second-order accurate method for the passive guaran-
teed simulation of port-Hamiltonian systems. IFAC-
PapersOnLine, 48(13), 223-228.
1
/
3
100%