chapitre 4

LE GUIDAGE EN TRANSLATION
132
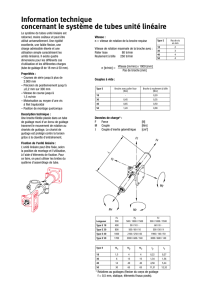
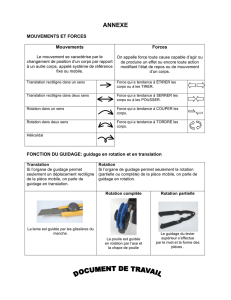
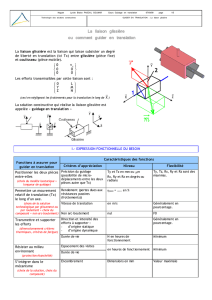
3-FONCTIONNEMENT :
On fait tourner la vis de manœuvre (2), la pièce guide (3) se translate pour déplacer,
suivant le sens de rotation de la vis, le vé de positionnement (4) suivant une trajectoire
verticale.
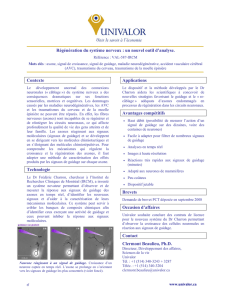
4- SCHEMA CINEMATIQUE :
5- NATURE D’UNE LIAISON :
Une liaison qui conserve un (ou plusieurs)
degrés de liberté réalise un guidage .
Exemples :
●La liaison pivot (L2/1) permet une rotation
entre (2) et (1) , elle réalise :
un guidage en rotation
●La liaison glissière (L4/1) permet une
translation entre (4) et (1) ,elle réalise :
un guidage en translation.
En construction mécanique, les guidages les
plus fréquemment rencontrés sont :
●guidage en translation.
●guidage en rotation
Classes d’équivalence ;
●A : 1,5,6.
●B : 2
●C : 3
●D : 4
Vé de
positionnement
CHAPITRE 3

CHAPITRE 3 LE GUIDAGE EN TRANSLATION
133
GUIDAGE EN TRANSLATION
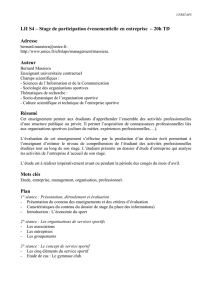
1 - CARACTERISTIQUES DU GUIDAGE :
VE REGLABLE
La liaison glissière entre le vé de positionnement (4) et le
corps (1) assure un guidage en translation.
Un guidage en translation peut être caractérisé par :
●La forme des surfaces de contact : prismatique ou cylindrique.
●Le genre du mouvement relatif : glissement ou roulement.
●Le dispositif de réglage du jeu
●L’état des surfaces en contact et leur lubrification.
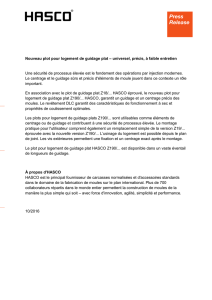
2- GUIDAGES PAR GLISSEMENT :
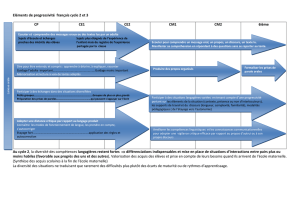
2-1 Guidages prismatiques :
2-1-1 Sans dispositif de réglage du jeu :
Ces guidages sont généralement utilisés pour des mouvements de faible amplitude et des
déplacements intermittents. Leur blocage est nécessaire après mise en position. Les
ajustements choisis déterminent le jeu de fonctionnement.
Guidage rectangulaire par languette
Exemple1 : Vé réglable
La pièce mobile est un coulisseau.
La pièce fixe est une glissière
Languette
Coulisseau
Glissière

134
CHAPITRE 3 LE GUIDAGE EN TRANSLATION
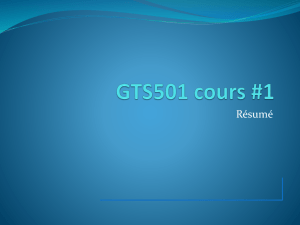
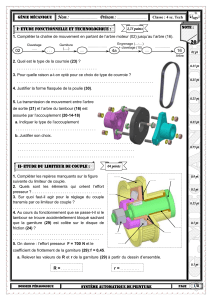
Guidage rectangulaire par lardon
Exemple 2 : support d’outil à affûter
Fonction : Ce support d’outil se monte sur la table d’une machine d'affutage pour fixer les
outils de coupe en vue de leur donner l’orientation convenable .
Le positionnement de ce support sur la table est assuré par un lardon (7) qui se loge dans
une rainure en Té de la machine.
Semelle, lardon et deux vis de fixation

135
Nb

CHAPITRE 3 LE GUIDAGE EN TRANSLATION
136
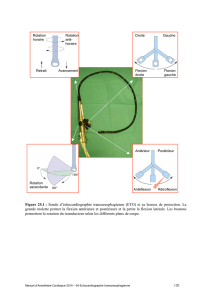
Guidage rectangulaire en Té
Exemple 3 :étau à centrer
Fonction : Cet étau sert à centrer et immobiliser des pièces cylindriques sur la table d’une
machine-outil en vue d’apporter des modifications sur ces pièces.
Guidage en Té
pièce
 6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73
74
75
76
77
78
79
80
81
82
83
84
85
86
87
88
89
90
91
92
93
94
95
96
97
98
99
100
101
102
103
104
105
106
107
108
109
110
111
112
113
114
115
116
117
118
119
120
121
122
123
124
125
126
127
128
129
130
131
132
133
134
135
136
137
138
139
140
141
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73
74
75
76
77
78
79
80
81
82
83
84
85
86
87
88
89
90
91
92
93
94
95
96
97
98
99
100
101
102
103
104
105
106
107
108
109
110
111
112
113
114
115
116
117
118
119
120
121
122
123
124
125
126
127
128
129
130
131
132
133
134
135
136
137
138
139
140
141
1
/
141
100%