etude par simulation hil des performances d`un statcom pour la

395
J. Rech. Sci. Univ. Lomé (Togo), 2015, Série E, 17(1) : 395-404
ETUDE PAR SIMULATION HIL DES PERFORMANCES D’UN
STATCOM POUR LA STABILISATION DE LA TENSION D’UNE
GENERATRICE ASYNCHRONE AUTO EXCITEE DANS UN RESEAU
AUTONOME SOUS LABVEW AVEC LA CARTE ARDUINO
HOUNKPE HOUENOU G.A.
1,*
, HOUNGAN K. Th.
1
,
MOUKENGUE IMANO. A.
2
, VIANOU A.
1
1- Laboratoire d’Electrotechnique, de Télécommunication et d’Informatique Appliquée
(ECOLE POLYTECHNIQUE d’ABOMEY CALAVI/Université d’Abomey Calavi)
01 BP : 2009 Cotonou
2- Laboratoire d’Electronique, d’Electrotechnique, d’Automatique et
Télécommunications, équipe de recherche en Système d’Energie Electrique, Université
de Douala, BP : 8698 Douala ; Cameroun
Correspondance : courriel : [email protected]
(Reçu le 24 Octobre 2014 ; Révisé le 17 Avril 2015 ; Accepté le 24 Avril 2015)
RESUME
Ce travail présente l’étude par simulation Hardware In the Loop (HIL) des performances
d’un STATCOM pour la stabilisation de la tension délivrée par une génératrice
asynchrone triphasée auto excitée dans un réseau autonome. Nous avons combiné
l’utilisation du logiciel de simulation LABVIEW et la carte ARDUINO pour réaliser cette
simulation. Les modèles de la génératrice asynchrone auto excitée et du compensateur
statique parallèle STATCOM ont été réalisés dans LABVIEW. La carte ARDUINO
utilisée a permis de générer les signaux de Modulations de Largeurs d’Impulsion qui
commandent les interrupteurs du convertisseur statique. La Commande Prédictive par
Modèle (MPC)a permis la régulation de la tension par rapport aux consignes indiquées.
Les résultats obtenus sont satisfaisants aux vues du temps de réponse dela commande par
rapport aux corrections apportées par la commande et les signaux de commandes envoyés
par la carte sur les interrupteurs.
Mots clés : STATCOM, génératrice asynchrone auto excite, MPC.
ABSTRACT
This paper presents the study by simulation Hardward In the Loop (HIL) of the
performances of a STATCOM for the stabilization of the tension delivered by tree- self
excited induction generator in an autonmous network. We combined the use of the
software of the simulation LABVIEW and card ARDUINO to carry out this simulation.
Models othe asynchronous generator self excited and the parallel Static Compensator
(STATCOM) have been realized in LABVIEW. Card ARDUINO used allowed to
generate signals of Pulse Widths Modulations which order swithes of the STATCOM.
The Model Predictive Command (MPC) allowed the regulation of the tension with regard
to the indicated instructions. The obtained results are satisfactory in terms of the timeof
response of the command with regard the corrections brought by the command and the
signals of commands sent by the card on switches.
Keywords:STATCOM, self excited induction generator, MPC.

HOUNKPE HOUENOU G.A. & al.
396
J. Rech. Sci. Univ. Lomé (Togo), 2015, Série E, 17(1) : 395-404
1. INTRODUCTION
’énergie électrique est un facteur essentiel
dans le développement et l’évolution de la
société humaine. Elle est la forme d’énergie
indispensable de par sa souplesse d’utilisation et
sa multiplicité de domaines d’activités, où elle
joue un rôle de premier plan. Compte tenu du
nombre croissant de la population, la production
de cette énergie devient très importante et
l’utilisation des formes de production de
proximité permet la réduction des coûts, afin de
favoriser les consommateurs ordinaires de
trouver l’énergie pour leur besoin au quotidien.
La machine asynchrone triphasée, compte tenu
de ses multiples performances est utilisée dans
la production de l’énergie électrique surtout
grâce à la démultiplication des sources de
production.
Cette machine utilisée en génératrice produit de
l’énergie dont la fréquence et la tension varient
très vite non seulement avec la vitesse
d’entraînement mais aussi avec la charge. En
effet, la génératrice asynchrone nécessite
l’énergie réactive fournie par un banc de
condensateurs pour sa magnétisation, et la
charge puise éventuellement dans ce même banc
de condensateurs son énergie réactive,
diminuant ainsi l’excitation de la génératrice ;
d’où la nécessité de compenser cette énergie
réactive (POITIERS, 2003, IDJDARENE K et
al 2007, YOUSSEF et al 2008). Les
compensateurs à base d’électronique de
puissance ont une influence certaine sur le
comportement des réseaux électriques. Ainsi,
l’avènement des FACTS a contribué pleinement
à la résolution de telles situations
(PONMURUGAVEL et GHOUSE 2013,
MEKKAOUI et al. 2014, PADIAR 2007,
CHOUBEY et CHOUDHARY 2013)
Plusieurs études sur la génératrice asynchrone à
cage d’écureuil ont été menées pour réguler la
tension et la fréquence dans un réseau électrique
isolé avec des résultats très intéressants. La
qualité des résultats de la commande prédictive
de type MPC a été prouvée avec des temps de
réponse assez satisfaisant, par rapport aux
différentes méthodes utilisées dans la régulation
prise en compte dans notre cas
(PONMURUGAVEL et GHOUSE 2013)
Dans l’étude comparative entre les différentes
méthodes de commandes, à savoir la commande
prédictive, proportionnel intégral et logique
floue (PONMURUGAVEL et GHOUSE 2013),
il a été prouvé la rapidité de réponse de la
commande prédictive par rapport aux autres.
Dans ce travail consacré à l’étude de la
stabilisation de la tension de la génératrice
asynchrone triphasée auto-excitée, il est
procédé à la modélisation de la génératrice, du
système de compensation et de la charge, avant
de passer à la méthode de commande des
interrupteurs du STATCOM pour l’optimisation
du système en utilisant la commande prédictive
de type MPC.
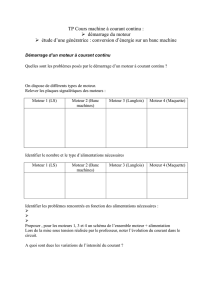
2. Présentation du système étudié
Le système en étude est constitué d’une
génératrice asynchrone triphasée auto excitée
par un banc de condensateurs, d’un
compensateur statique STATCOM (STATic
COMpensator) et d’une charge inductive
équilibrée. Cet ensemble est représenté à la
Figure 1.
L

Etude par simulation HIL des performances d’un STATCOM pour la stabilisation de la tension
d’une génératrice asynchrone auto excitée dans un réseau autonome sous LABVEW
avec la carte ARDUINO
397
J. Rech. Sci. Univ. Lomé (Togo), 2015, Série E, 17(1) : 395-404
Figure 1 : Présentation du système étudié
3. Modèle mathématique du système
3.1. Modélisation de la génératrice asynchrone
triphasée
Nous considérerons le régime de saturation de
l’inductance de magnétisation. Les systèmes
d’équations (1) et (2) représentent le modèle
mathématique correspondant sans la prise en
compte des condensateurs d’auto amorçage.
En appliquant les transformations de Park aux
équations électriques de la génératrice triphasée
asynchrone, on a dans le référentiel d-q
(POITIERS, 2003, IDJDARENE K et al 2007,
YOUSSEF et al 2008):
⎩
⎪
⎪
⎨
⎪
⎪
⎧
=−
+
+
+
=−
−
+
+
=
−
+
=
−
−
(1)
⎩
⎪
⎪
⎨
⎪
⎪
⎧
=
−
=
−
=
−
=
−
=
+
=
+
(2)
=
(
)
; =
(
)
;
=
(
)
(3)
où :
,
,
et
désignent les flux respectifs
au stator et au rotor dans le référentiel d-q.
,
,
et
représentent les tensions
respectives au stator et au rotor dans le
référentiel d-q.
,
,
,
et
désignent les résistances et
inductances au stator et au rotor et l’inductance
de magnétisation.
,
,
et
désignent les courants au stator
et au rotor dans le référentiel d-q.
L’inductance de magnétisation est fonction du
courant de magnétisation
. Elle est
approximée soit par une fonction polynôme soit
par une fonction exponentielle dépendante du
courant de magnétisation ou de la tension de
phase, exprimé à travers l’équation (4).
=
+
+
+
+
où
=
+
(4)
Les coefficients du polynôme de l’équation (4)
sont donnés par :
A
4
=-0.10370088.10
-4
; A
3
=0.36874912.10
-3
;
A
2
=-0.44345428.10
-2
; A
1
=0.14891028.10
-1
;
A
0
=0.10499759
En considérant une charge équilibrée, on a la
relation matricielle (5) qui désigne l’équation

HOUNKPE HOUENOU G.A. & al.
398
J. Rech. Sci. Univ. Lomé (Togo), 2015, Série E, 17(1) : 395-404
d’auto-amorçage de la génératrice aux bornes
des condensateurs d’excitation
.
=
0
0
−
−
−
−
+
0
−
0
(5)
i
chd
et i
chq
sont les courants de la charge dans le
référentiel d-q.
et représentent
respectivement le nombre de pairs de pôle et la
vitesse de rotation de la machine. Pour une
charge RL, les tensions
et
aux bornes de
la charge dans le référentiel d-q sont exprimées
par le système d’équations :
=
+
=
+
(6)
Chacune de ces équations (5) et (6) complétera
le modèle de la génératrice asynchrone pour
donner le bloc de simulation final souhaité pour
les études.
3.2. Modélisation du système de
compensation STATCOM
A partir des différentes modèles mathématiques
du STATCOM de la littérature
(PONMURUGAVEL et GHOUSE 2013,
MEKKAOUI et al. 2014, PADIAR 2007,
PETITCLAIR 1997) nous avons obtenu le
système d’équations (7) dans le référentiel d-q.
Les différentes grandeurs intervenant dans le
modèle sont réelles.
⎩
⎪
⎨
⎪
⎧
=−
+
+
(
−
)
=−
−
+
=
−
(7)
En ramenant les différentes grandeurs réelles du
modèle (7) en grandeurs réduites, le modèle
devient (8):
⎩
⎪
⎪
⎨
⎪
⎪
⎧
=−
+
=−
+
=
+
+
−
(8)
avec
=
+
(
−
) ;
=−
′
+
(
).
désigne la valeur réduite de la grandeur réelle
Le modèle obtenu en (8) peut être simplifié en
linéarisant le modèle de l’équation (7) autour du
point de fonctionnement. Ainsi en développant
le modèle non linéaire en série de Taylor autour
des points
=
,
,
et
=
[
,
]
et en négligeant les termes d’ordre
supérieur à 1, le modèle (8) se présente sous la
forme suivante de l’équation (9) :
∆̇=∆+∆ (9)
avec
∆=∆′
∆′
∆′
,∆=∆
∆
,=
⎣⎢⎢⎢⎢⎡
⎦⎥⎥⎥⎥⎤
,=
⎣⎢⎢⎢⎡
⎦⎥⎥⎥⎤
Où
=
,
=
=
Après développement et simplification de
et, le modèle linéarisé du STATCOM est
exprimé par l’équation (10) :

Etude par simulation HIL des performances d’un STATCOM pour la stabilisation de la tension
d’une génératrice asynchrone auto excitée dans un réseau autonome sous LABVEW
avec la carte ARDUINO
399
J. Rech. Sci. Univ. Lomé (Togo), 2015, Série E, 17(1) : 395-404
∆̇
∆̇
)
∆̇
=
⎣⎢⎢⎢⎡
−
0 0
0 −
0
⎦⎥⎥⎥⎤
∆
∆
∆
1 0
0 1
∆
∆
(10)
avec
=
(
)
;
=
(
)
;
=
−
(
)
−
=
(
)
;
=
(
)
Dans les équations (7) à (10) les notations i
shd
,
i
shq
, V
shd
,V
shq
et V
DC
désignent les courants et
tensions de sortie côté alternatif et la tension du
côté continu du compensateur STATCOM.
4. Commande des interrupteurs du
STATCOM
4.1. Stratégie de la commande prédictive
La commande prédictive de type MPC est une
commande qui utilise explicitement un modèle
d’état du système à commander pour prédire les
sorties et les états futurs du système à
commander. Cette capacité de prédiction permet
de calculer des commandes optimales à
appliquer à un système pour l’amener dans un
état désiré à partir de la minimisation d’un
critère de performance. La minimisation du
critère de performance conduit à une suite de
commande à appliquer au système, mais seul le
premier élément est appliqué : c’est le critère de
l’horizon fuyant.
Le modèle d’état discret utilisé par la commande
prédictive est le suivant (PONMURUGAVEL et
GHOUSE 2013)
(+1)=
()+
()
()=
()(11)
Avec
le vecteur d’état, l’entrée du
système, la sortie du système.
Dans la majorité des applications de la
commande prédictive, c’est le modèle d’état
incrémenté du système qui est utilisé. Ce modèle
se présente sous la forme suivante.
∆
(+1)
(+1)=
()
0
×
∆
()
()
()
+
∆() (12)
()=[0
×
]
∆
()
() (10)
A l’aide du modèle incrementé, les variables de
sorties prédites se calculent par la formule(13) :
+
|
=
(
)+
∆(
)+
∆(
+1)+
⋯+
∆(
+
−1)(13)
Les constantes
et
sont appelées
respectivement horizon de prédiction et horizon
de commande. La fonction coût qui reflète
l’objectif de la commande est définie par :
=(
−)
(
−)+∆
∆(14)
où, Y est un vecteur contenant les sorties
prédites sur l’horizon de prédiction, et
est un
vecteur contenant les consignes c’est-à-dire
l’objectif désiré sur l’horizon de prédiction.
La minimisation de J fournit :
∆=[∆(
)∆(
+1)∆(
+
2)…∆(
+
−1)]
. (15)
Selon le principe de l’horizon fini, seul la
commande ∆(
) est appliquée au système.
4.2. Algorithme de génération de MLI
La figure 2 montre les étapes parcourues pour la
communication entre la carte et le logiciel de
simulation LABVIEW.
 6
7
8
9
10
6
7
8
9
10
1
/
10
100%