Fichier pdf

Slide 1
Architectures parall`
eles: Un aperc¸u
1. Pourquoi des machines parall`
eles?
2. Classification de Flynn
3. Processeurs modernes et parall´
elisme
4. ´
Evolution des architectures parall`
eles
5. Rˆ
ole et gestion des caches
6. Mod`
eles de
consistence
de m´
emoire
Slide 2
1 Pourquoi des machines parall`
eles?
•Am´
eliorations importantes au niveau des micro-processeurs
–Augmentation de la vitesse d’horloge ≈30 % par ann´
ee
–Augmentation de la densit´
e des circuits ≈40 % par ann´
ee
•mais...
•Plusieurs applications ne peuvent pas ˆ
etre trait´
ees en un temps raisonnable sur un ordina-
teur traditionnel
–simulation et analyse de ph´
enom`
enes physiques ou biologiques, e.g., pr´
ediction m´
et´
eo-
rologique, physique atomique, analyse de prot´
eines, g´
enome
–traitement d’images
–analyse du langage parl´
e
•Limite physique `
a l’am´
elioration de la vitesse des circuits
1

Slide 3
2 Classification de Flynn
Classe les machines selon le nombre de flux de donn´
ees et d’instructions:
SISD =
Single Instruction stream, Single Data stream
: Uniprocesseur classique ex´
ecutant (du
point de vue du programmeur) une seule instruction `
a la fois, e.g., machine RISC moderne.
SIMD =
Single Instruction stream, Multiple Data streams
: Machine o`u une seule instruction
s’ex´
ecute sur plusieurs donn´
ees ind´
ependantes `
alafois.
MISD =
Multiple Instruction streams, Single Data stream
: Aucune machine connue.
MIMD =
Multiple Instruction streams, Multiple Data streams
: Plusieurs instructions distinctes
s’ex´
ecutant sur des donn´
ees ind´
ependantes.
Slide 4
3 Processeurs modernes et parall´
elisme
3.1 Pipeline d’analyse et d’ex´
ecution des instructions
•Plusieurs instructions cons´
ecutives peuvent ˆ
etre en cours d’ex´
ecution au mˆ
eme moment,
mais `
a des ´
etapes diff´
erentes
IF ID EX MEM WB
IF: Instruction Fetch
ID: Instruction Decode
EX: Execute
MEM: Memory Access
WB: Write Back
•Permet la r´
eduction du temps de cycle du processeur (augmentation de la fr´
equence de
l’horloge)
•Probl`
emes et solutions:
–Al´
eas de donn´
ees ⇒unit´
ede
forwarding
–Al´
eas de contrˆ
ole ⇒
pr´
ediction dynamique des branchements
2

Slide 5
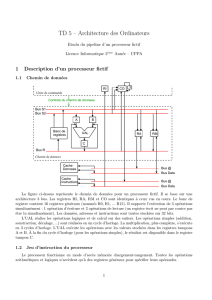
3.2 Machines superscalaireset ordonnancement dynamique des instruc-
tions
•Plusieursinstructionspeuvent ˆ
etre en cours d’ex´
ecutiondansdes unit´
esd’ex´
ecutiondiff´
erentes
(en autant que les d´
ependances de donn´
ees soient respect´
ees)
Station de
réservation Station de
réservation Station de
réservation Station de
réservation
Unité
entière
Unité
entière Unité
flottante chargement
Unité de
IF/ID
Unité de
mise à la
retraite
(Commit)
Émission
en ordre
Exécution
dans le
désordre
Mise à la
retraite
en ordre
. . .
. . .
Slide 6
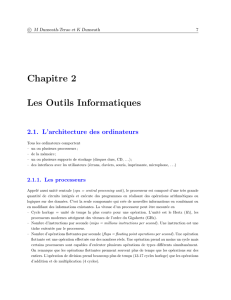
3.3 Tampon d’´
ecriture et ex´
ecution pipelin´
ee des acc`
es m´
emoire
Ex´
ecution d’un store: Le processeur
amorce
l’ex´
ecution du store puis continue imm´
edia-
tement avec l’instruction suivante
⇒Plusieurs acc`
es m´
emoire en cours d’ex´
ecution
Processeur
Cache
Memoire
store $2, 100($6) ; Compl`
ete imm´
ediatement
store $4, 104($7) ; Compl`
ete imm´
ediatement
load $3, 104($7) ; Attente pour la valeur
3

Slide 7
4´
Evolution des architectures parall`
eles
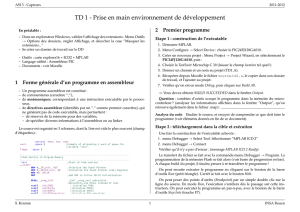
4.1 Machine SIMD
PE PE PE PE
PE PE PE PE
PE PE PE PE
PE PE PE PE
Unité
de
contrôle
•Tr `
es courantes parmi les premi`
eres ma-
chines parall`
eles mais de moins en moins
usit´
e de nos jours.
•Typiquement des machines qui manipulent
des tableaux (matrices) de donn´
ees, con-
duisant `
a du “parall´
elisme de donn´
ees”.
VAR A, B, C: ARRAY[1..4, 1..4] OF REAL;
C:=A+B;
Slide 8
•Motivations initiales pour de telles machines:
–Obtenir une machine parall`
eledecoˆut faible endupliquant uniquement les unit´
esd’ex´
ecution
sans dupliquer l’unit´
e de contrˆ
ole.
–Minimiser l’espace m´
emoire requis en ayant une seule copie du code.
•D´
esavantage majeur: Excellent pour des programmes manipulant des tableaux uniformes
de donn´
ees,
mais
tr`
es difficile `
a programmer et `
a utiliser efficacement (les instructions
conditionnelles peuvent conduire un grand nombre de processeurs `
a rester inactifs).
Dernier exemple important (ann´
ees 80) d’une telle machine:
Connection Machine
, avec 64K
processeurs ... `
a 1 bit chacun
4

Slide 9
4.2 Machine MIMD avec bus et m´
emoire partag´
ee
Multiprocesseurs
CacheCache
Processeur Processeur
Mémoire
Avantages/d´
esavantages:
+Probl`
emedelacoh´
erence des caches facilement r´
esolu (
snoopy bus
)
−Ne permet pas le parall´
elisme massif (max. ≈30 processeurs) pcq.
1 seule
transaction `
a
la fois sur le bus
Slide 10
4.3 Machine MIMD avec r´
eseau et m´
emoire distribu´
ee
Multi-ordinateurs
Cache
Processeur
Cache
Processeur
MémoireMémoire
Réseau
Avantages/d´
esavantages:
+Permet un plus grand parall´
elisme (transactions multiples sur le r´
eseau)
=Probl`
emedelacoh´
erence des cache r´
esoluble mais plus complexe
−Temps de latence
impr´
evisible
(
NUMA = Non-Uniform Memory Access
)⇒Que faire en cas
de faute de cache/acc`
es r´
eseau?
5
 6
7
8
9
10
11
12
13
14
15
6
7
8
9
10
11
12
13
14
15
1
/
15
100%