chapitre 5 circuits lineaires en regime permanent

Université de Savoie DEUG Sciences et Technologie 1er semestre
Electronique et Instrumentation
Chp-5 Analyse fréquentielle des signaux et systèmes page 35
Circuits linéaires en régime permanent sinusoïdal
CHAPITRE 5
CIRCUITS LINEAIRES EN REGIME PERMANENT
SINUSOIDAL
1. PRÉSENTATION.....................................................................................................................................................36
2. RÉGIME PERMANENT SINUSOÏDAL ..............................................................................................................36
2.1 DÉFINITION .............................................................................................................................................................36
2.2 EXEMPLE SUR UN SYSTÈME DU 1ER ORDRE...............................................................................................................36
2.3 GÉNÉRALISATION ....................................................................................................................................................36
2.4 REPRÉSENTATION GRAPHIQUE : DIAGRAMME DE FRESNEL.....................................................................................37
3. NOTATION COMPLEXE ......................................................................................................................................38
3.1 RAPPELS SUR LES COMPLEXES.................................................................................................................................38
3.2 REPRÉSENTATION COMPLEXE..................................................................................................................................38
3.3 NOTATION...............................................................................................................................................................39
3.4 CALCUL COMPLEXE.................................................................................................................................................39
4. EXTENSION DES LOIS DE KIRCHOFF AUX COMPLEXES .......................................................................39
4.1 LOI DES MAILLES .....................................................................................................................................................39
4.2 LOI DES NŒUDS .......................................................................................................................................................39
5. EXTENSION DES THÉORÈMES FONDAMENTAUX AUX COMPLEXES................................................39
6. DIPÔLES ...................................................................................................................................................................40
6.1 DIPÔLES PASSIFS .....................................................................................................................................................40
6.1.1 Impédance et admittance complexes ...........................................................................................................40
6.1.2 La résistance ................................................................................................................................................40
6.1.3 L’inductance.................................................................................................................................................40
6.1.4 Le condensateur...........................................................................................................................................41
6.1.5 Conclusion....................................................................................................................................................41
6.2 DIPÔLES ACTIFS.......................................................................................................................................................41
7. PUISSANCE EN RÉGIME SINUSOÏDAL...........................................................................................................41
7.1 FACTEUR DE PUISSANCE - PUISSANCE ACTIVE.........................................................................................................41
7.2 EXPRESSION COMPLEXE DE LA PUISSANCE ..............................................................................................................42
8. QUADRIPÔLES LINÉAIRES................................................................................................................................42
8.1 DÉFINITIONS............................................................................................................................................................42
8.2 GRANDEURS CARACTÉRISTIQUES D’UN QUADRIPÔLE ACTIF....................................................................................43
8.2.1 Modèle général d’un quadripôle.................................................................................................................43
8.2.2 Adaptation d’un quadripôle ........................................................................................................................44
9. NOTION DE FONCTION DE TRANSFERT.......................................................................................................45
9.1 DÉFINITION .............................................................................................................................................................45
9.2 EXEMPLES ...............................................................................................................................................................45
9.2.1 Circuit RC ....................................................................................................................................................45
9.2.2 Circuit RLC ..................................................................................................................................................46
9.2.3 Filtre actif.....................................................................................................................................................46

Université de Savoie DEUG Sciences et Technologie 1er semestre
Electronique et Instrumentation
Chp-5 Analyse fréquentielle des signaux et systèmes page 36
Circuits linéaires en régime permanent sinusoïdal
1. Présentation
Dans ce chapitre on propose une seconde méthode de détermination du régime permanent dans le cas
de signaux sinusoïdaux. Cette méthode permet de résoudre les équations avec des régimes
sinusoïdaux comme on l’aurait fait avec des grandeurs continues, c’est à dire de façon très simple
d’un point de vue mathématique.
2. Régime permanent sinusoïdal
2.1 Définition
Le régime permanent sinusoïdal est le régime de fonctionnement des systèmes linéaires
correspondant à une excitation sinusoïdale établie depuis un temps infini (le régime transitoire est
complètement éteint).
2.2 Exemple sur un système du 1er ordre
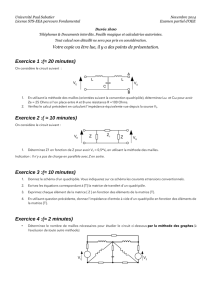
Soit le circuit de la figure 5.1.
Figure 5.1. Circuit RC.
On a : eRis=+ et iC
ds
dt
=, d’où :
() ()
st ds
dt et+=
τ
où
τ
=RC .
Si l’on écrit
() ()
tCosEte
ω
2= et que l'on remplace cette solution dans l'ED, on obtient pour le
régime permanent :
() ()
ϕω
+= tCosSts p2
avec :
()
2
1
τω
+
=E
S et
ωτ
ϕ
−=tg .
Le signal d’entrée du système e(t) et le signal de sortie
()
ts p auront donc, en régime permanent, soit
dès que le régime transitoire sera négligeable, la même allure sinusoïdale et la même pulsation.
()
ts p est multiplié par le gain E
S
H= et déphasé de
ϕ
par rapport à e(t) .
2.3 Généralisation
On peut montrer que toutes les grandeurs électriques d’un système linéaire (R,L,C) excité par un
signal sinusoïdal seront sinusoïdales et de même pulsation que le signal d’excitation.
En effet, l’équation différentielle d’un système linéaire possédant comme entrée
()
te et comme sortie
()
ts s’écrit :
() ()
tsb
dt
ds
b...
dt
sd
b
dt
sd
btea
dt
de
a...
dt
ed
a
dt
ed
am
m
m
m
m
m
n
n
n
n
n
n01
1
1
101
1
1
1++++=++++ −
−
−
−
−
−.
Pour un système du premier ordre, on a :
() ()
tKe
dt
ds
ts =+
τ
()
it
C
R
()
et
()
ts

Université de Savoie DEUG Sciences et Technologie 1er semestre
Electronique et Instrumentation
Chp-5 Analyse fréquentielle des signaux et systèmes page 37
Circuits linéaires en régime permanent sinusoïdal
Pour un système du second ordre, on a :
() ()
tKets
dt
ds
dt
sd =++
0
2
2
2
0
21
ω
ξ
ω
Dans les deux cas, si
()
te est sinusoïdal, alors
()
ts l’est également, et vice-versa. En effet, si
() ()
ϕω
+= tCos.Sts 2, alors
()
ϕωω
+−= tSin.S
dt
ds 2,
() ()
ts.tCos.S
dt
sd 22
2
2
2
ωϕωω
−=+−= ,
…toutes les dérivées font apparaître des fonctions Sinus ou Cosinus,
()
ts sera donc une fonction
sinusoïdale de la forme
() ()
ϕω
+= tCos.Sts 2.
2.4 Représentation graphique de S et de
ϕ
ϕϕ
ϕ
: Diagramme de Fresnel
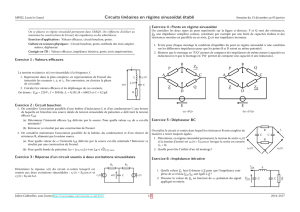
Un signal sinusoïdal est représenté par l‘équation suivante :
() ( )
ϕω
+= tCos.Yty
On associe à cette grandeur sinusoïdale un vecteur tournant dans le sens trigonométrique avec une
vitesse angulaire
ω
, autour de l’origine O. Ce vecteur est nommé OY et sa longueur est
proportionnelle à Y . La projection de OY sur l’axe de référence représente l’évolution de y(t) (voir
figure 5.2).
Figure 5.2
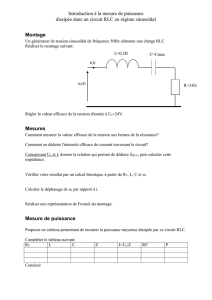
Considérons deux signaux sinusoïdaux de même pulsation :
() ()
111 2
ϕω
+= tCosYty et
() ()
222 2
ϕω
+= tCosYty
La représentation de Fresnel de ces 2 signaux à 2 instants différents est donnée sur la figure 5.3. Ces
représentations fournissent autant d’information l’une que l’autre à savoir l’amplitude des signaux et
le déphasage entre les signaux. 12
ϕϕφ
−= représente le déphasage entre
()
ty2 et
()
ty1.
Figure 5.3.
axe de référence
ω
Y
0
axe de référence
ω
axe de référence
0
Y2
Y1
ω
0
Y2
Y1
instant t = 0 instant t1 > 0
φφ
ϕ
1
ϕ
2
ϕ
1
ϕ
2

Université de Savoie DEUG Sciences et Technologie 1er semestre
Electronique et Instrumentation
Chp-5 Analyse fréquentielle des signaux et systèmes page 38
Circuits linéaires en régime permanent sinusoïdal
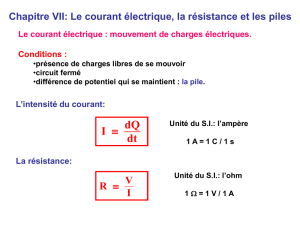
3. Notation complexe
3.1 Rappels sur les complexes
Un nombre complexe z s’écrit : jbaz += avec 1
2−=j. On appelle a la partie réelle de z et b la
partie imaginaire. On représente le lieu de z sur un plan complexe (figure 5.4).
Figure 5.4.
• Le module de z s’écrit 22 baz += ; il représente la « distance » du centre 0 du plan complexe
au lieu de z.
• L’argument ϕ de z se calcule simplement d’après la figure 5.4 :
()
a
b
tg =
ϕ
, donc
=a
b
Arctg
ϕ
.
• Considérons le rapport de deux nombres complexes : jdc
jba
z+
+
=.
Le module de z s’écrit alors : 22
22
22
dc
ba
jdc
jba
jdc
jba
BAz +
+
=
+
+
=
+
+
=+=
Le module du rapport de deux nombres complexes est égal au rapport des modules.
L’argument de z s’écrit :
()()
−
=+−+=
=c
d
Arctg
a
b
ArctgjdcArgjbaArg
A
B
Arctg
ϕ
L’argument du rapport de deux nombres complexes est égal à la différence des arguments.
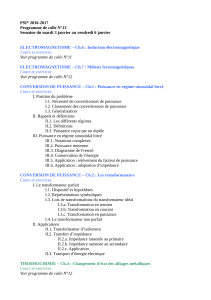
3.2 Représentation complexe
On passe des graphes de la figure 5.3 à ceux de la figure 5.5 en remplaçant simplement l’axe de
référence par l’axe de la partie réelle, l’axe vertical représentant la partie imaginaire. Les vecteurs
sont remplacés par des complexes.
Axe
Partie réelle
[
]
(
)
zRe
Axe
Partie imaginaire
[
]
(
)
zIm
Lieu de z
ϕ
a
b
0

Université de Savoie DEUG Sciences et Technologie 1er semestre
Electronique et Instrumentation
Chp-5 Analyse fréquentielle des signaux et systèmes page 39
Circuits linéaires en régime permanent sinusoïdal
Figure 5.5.
Le plan trigonométrique est donc remplacé par un plan complexe.
()
ω
jY1 et
()
ω
jY2 représentent les amplitudes complexes associées aux signaux réels
()
ty1 et
()
ty2. Les amplitudes complexes ne dépendent que de la pulsation
ω
(pas du temps t).
3.3 Notation
Dans la suite, on écrira Y à la place de
()
ω
jY afin d’alléger les écritures.
3.4 Calcul complexe
On associe à un signal
()
ty le signal complexe
()
tj
eYt,y
ω
ω
=. Y représente l’amplitude complexe
associée à
()
ty .
On revient à
()
ty à partir de
()
t,y
ω
de la façon suivante (on prend la partie réelle de
()
t,y
ω
) :
() ( )
[
]
[
]
tj
eYRet,yRety
ω
ω
== .
Exemple : On considère le signal
() ( )
ϕω
+= tCos.Yty ;
()
t,y
ω
s’écrit alors :
()
tj
eYt,y
ω
ω
= avec
ϕ
j
YeY=. Soit
() ( )
[
]
[
]
[]
()
[]
()
ϕωω ϕωωϕω
+===== +tCos.YYeReeYeReeYRet,yRety tjtjjtj .
4. Extension des lois de Kirchoff aux complexes
Les lois de Kirchoff s’appliquent selon les mêmes règles que précédemment (voir chapitre 2).
4.1 Loi des mailles
()
∑∑
==
kk
kk U tu 0devient0.
4.2 Loi des nœuds
() ()
∑∑∑∑==
kkk
se
k
se II titi devient
5. Extension des théorèmes fondamentaux aux complexes
Le théorème de superposition et le théorème de Thévenin s’appliquent selon les mêmes règles que
précédemment (voir chapitre 2).
Partie Réelle
()
ω
jY2
(
)
ω
jY
1
(
)
ω
jY
2
(
)
ω
j
Y
1
Partie Réelle
Partie
Imaginaire
Partie
Imaginaire
ω
0
ω
0
instant t = 0 instant t1 > 0
φφ
ϕ
1
ϕ
2
ϕ
1
ϕ
2
 6
7
8
9
10
11
12
13
6
7
8
9
10
11
12
13
1
/
13
100%