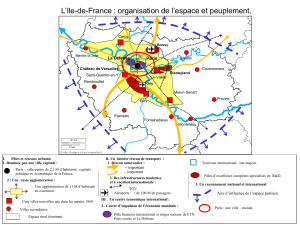
• Présentation de l`Axe Z

Formation des enseignants
ET223
• Présentation de l’Axe Z
Hacheur
Mcc
Géné_Tachy
Réducteur Pignon;Crémaillère

Formation des enseignants
ET223
• Modélisation du moteur
– Moteur à courant continu commandé en tension(flux
constant)
• Coefficient de couple =coefficient de fem=
K
e
=0.145V/rd/s
• Résistance de l’induit :
R=0.56Ω
• Inductance totale du circuit d’induit
: L=5.3mH
• Moment d’inertie du moteur :
J
m=
0.0005kg.m
2
• Coefficient de frottement visqueux:
f
v
=86.10
-6
Nm/rd/s
• Hacheur
– Tension d’entrée 10V; Tension de sortie 60V:
» Gain =6=A

Formation des enseignants
ET223
– Réducteur
• Rapport de réduction: n=1/16
– Charge:
• Masse :20kg
– Roue dentée:
• Diamètre:D=54mm

Formation des enseignants
ET223
• Les variables
– U(t):tension de commande
– I(t): courant dans l’induit
–Ω(t): vitesse angulaire du moteur(rd/s)
– N(t): vitesse de rotation du moteur en (tr/mn)
– E(t): FEM
– C(t): couple moteur
– Cr(t): couple résistant
– J: Moment d’inertie total ramené sur l’arbre du moteur

Formation des enseignants
ET223
• Ecrire les équations électriques et
mécaniques du moteur
)(
)(
)()(
)()(
)()(
)(
)(
)()(
tf
dt
td
JCtCtC
tKitC
tKtE
tE
dttdi
LtRitAu
sr Ω+
Ω
=−−
=Ω=
++=
(
)
( )
)()()(
)()(
)()(
)()()
pJpfCCpC
pKIpC
pKpE
pEpILpRAUp
sr
Ω+=+−
=Ω= ++=
•En déduire I(p) en fonction de U(p), E(p)et la constante de
temps électrique τ
ττ
τe=L/R; de même Ω(p) en fonction de Cr,
Cset la constante de temps mécanique τ
ττ
τm=J/f
[ ] [ ]
p
f
J
f
CCpCp
p
R
L
R
pEpAUpI
sr
+
+−=Ω
+
−= 1
1
)()()(;
1
1
.)()()(
 6
7
8
9
10
11
12
13
14
15
6
7
8
9
10
11
12
13
14
15
1
/
15
100%