Physique, Chapitre 6 Terminale S

COMPRENDRE Page 1 sur 5 Temps, mouvement et évolution
Physique, Chapitre 6 Terminale S
MOUVEMENTS PLANS
DANS UN CHAMP DE PESANTEUR OU ELECTROSTATIQUE UNIFORME
I - MOUVEMENTS DANS UN CHAMP DE PESANTEUR UNIFORME
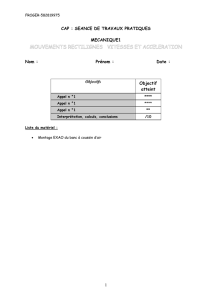
Considérons un solide S soumis à une impulsion initiale, donc ayant une vitesse
initiale
non nulle, faisant un angle avec l’axe horizontal.
1) Les équations horaires du mouvement
a)
Choix du système et du référentiel
Système étudié : un objet ponctuel de masse m
Référentiel utilisé : le laboratoire (supposé galiléen)
b)
De la deuxième loi de Newton à l’accélération
Force(s) extérieure(s) appliquée(s) au système : le poids
D’après la deuxième loi de Newton :
Remarques :
En supposant que le système est ponctuel, nous avons :
L’accélération du système en chute libre est indépendante de sa masse.
En considérant le vecteur champ de pesanteur comme uniforme (
), l’accélération est alors
constante : le mouvement peut être qualifié d’uniformément varié.
Les coordonnées du vecteur accélération
s’obtiennent par projection des vecteurs sur les trois axes du
repère cartésien (O ; , ,
) :
soit
c)
De l’accélération à la vitesse
Les vecteurs accélération et vitesse étant liés par
, nous obtenons :
Par intégration, nous obtenons :
Compte-tenu de l’orientation du vecteur vitesse initiale
nous avons :
Remarques :
La vitesse selon l’horizontale est indépendante du temps : le mouvement horizontal est uniforme.
La vitesse selon la verticale est une fonction affine du temps : comme pour une chute libre verticale, trois
cas de figure se présentent alors :
Au cours de la phase ascendante : vz > 0 soit - g.t + v0.sin > 0 soit
Au sommet de la trajectoire, la vitesse du système est nulle : vz = 0
soit - g.t + v0.sin = 0 soit à la date
Au cours de la phase descendante : vz < 0 soit - g.t + v0.sin < 0 soit
O
x
z

Physique
Chapitre 6 : Mouvement plan dans un champ uniforme
COMPRENDRE Page 2 sur 5 Temps, mouvement et évolution
d)
De la vitesse à la position
Les vecteurs vitesse et position étant liés par
, nous avons :
Par intégration, nous obtenons :
Si le système est parti de l’origine du repère, les équations horaires s’écrivent :
2) L’équation cartésienne de la trajectoire
Définition
Détermination de l’équation cartésienne
Nous avons montré que x = (v0.cos).t donc
Remarque :
L’équation du mouvement étant de la forme z = a.x2 + b.x + c, la trajectoire est parabolique.
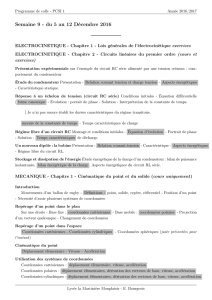
3) Caractéristiques de la trajectoire
a) Notion de portée
Définition
z
x
k
v0
i
g
xS
xMax
h
O
zMax

Physique
Chapitre 6 : Mouvement plan dans un champ uniforme
COMPRENDRE Page 3 sur 5 Temps, mouvement et évolution
Détermination de la portée
En utilisant l’équation cartésienne, et sachant que l’origine des cotes est prise au départ du solide, nous
obtenons :
1ère solution :
2ème solution :
Propriétés
La portée est donc proportionnelle au carré de la vitesse initiale du solide.
La portée est maximale lorsque sin(2) = 1 soit 2 = 90° [2] soit = 45° []
Déterminons la vitesse du solide lors de l’impact au sol, définie par :
Nous avons :
Lors de l’impact :
Nous avons montré que
donc
Soit
soit
Pour cette date d’impact, nous avons :
Soit
soit
La vitesse du solide s’exprime donc par :
La vitesse du solide lors de l’impact est donc égale à la vitesse initiale (dans le cas d’une absence de
force de frottement).
b)
Notion de flèche
Définition
Détermination de la flèche
L’abscisse xS du sommet S de la trajectoire peut s’obtenir en écrivant :
ce qui donne, d’après l’équation cartésienne de la trajectoire :
Remarque:
Nous avions (§ 4°)a)2-)
donc

Physique
Chapitre 6 : Mouvement plan dans un champ uniforme
COMPRENDRE Page 4 sur 5 Temps, mouvement et évolution
Réutilisons l’équation cartésienne de la trajectoire pour déterminer la flèche :
Remarque :
Si les frottements de l’air ne sont plus négligés :
la trajectoire n’est plus parabolique,
la portée et la flèche sont réduites.
II - MOUVEMENTS DANS UN CHAMP ELECTROSTATIQUE UNIFORME
Considérons une particule supposée ponctuelle, de masse m et de charge q,
et possédant une vitesse initiale
non nulle, faisant un angle avec la
parallèle aux plaques d’un condensateur source d’un champ électrostatique
uniforme E.
1) Choix du système et du référentiel
Système étudié : une particule supposée ponctuelle de masse m et de charge q
Référentiel utilisé : le laboratoire (supposé galiléen)
2) De la deuxième loi de Newton à l’accélération
Force(s) extérieure(s) appliquée(s) au système : le poids
et la force de Coulomb
Nous supposerons que le poids est négligeable devant la force de Coulomb.
D’après la deuxième loi de Newton :
Projetons cette relation vectorielle sur le repère cartésien (O ; , ,
) :
Remarques :
Puisque le champ électrique est uniforme, alors E = Cte, donc l’accélération est constante : le mouvement est
alors uniformément varié.
2) De l’accélération à la vitesse
Les vecteurs accélération et vitesse étant liés par
, nous avons :
Par intégration, nous obtenons : soit
Remarque :
Puisque les coordonnées vy et vz ne sont pas nulles, le mouvement s’effectue dans le plan (O ; ,
).
y
z
P
N

Physique
Chapitre 6 : Mouvement plan dans un champ uniforme
COMPRENDRE Page 5 sur 5 Temps, mouvement et évolution
3) De la vitesse à la position
Les vecteurs vitesse et position étant liés par
, nous avons :
Par intégration, nous obtenons :
Si le système est rentré dans le champ électrique au niveau de l’origine du repère, nous avons :
4) L’équation cartésienne de la trajectoire
Nous avons montré que y = v0.cos.t donc
Puisque
Remarques :
L’équation du mouvement étant de la forme y = a.x2 + b.x + c, la trajectoire est parabolique.
La concavité de la parabole dépend du signe de la charge q.
4) Détermination de portée et de la flèche
La méthode de détermination de la portée et de la flèche est identique à celle vu dans le § I-3)
1
/
5
100%