moteur et Cde moteur CC 2

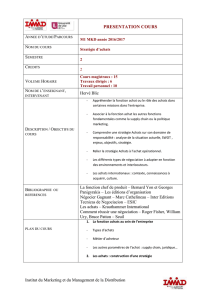
Ce motoréducteur HP (haute puissance) miniature offre un couple élevé habituellement
réservé à des moteurs plus imposants.
Il convient particulièrement aux applications solaires, avec une tension de démarrage très
faible.
Le réducteur en acier et laiton assure le transfert du couple vers l'axe de sortie.
Sortie sur axe de Ø3 mm avec méplat.
Alimentation: 6 Vcc typique (3 à 9 Vcc maxi)
Tension de démarrage: à partir de 0,5 Vcc
Consommation à vide: 80 mA
Consommation moteur bloqué: 1,6 A
Réduction: 100:1
Vitesse: 320 t/min à 6 Vcc
Couple: 2,2 kg.cm
Dimensions: 26 x 12 x 10 mm
Diamètre de l'axe: 3 mm (avec méplat)
Longueur de l'axe: 10 mm
Référence fabricant: 1101
CHOIX DU MOTEUR
Motoréducteur HP 997
réduction 150:1

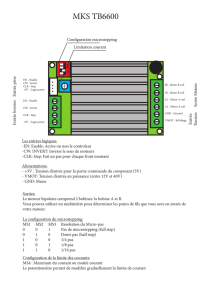
Commande de 2 moteurs DRI0002 2x2A
Double commande de moteurs DFRobot permettant de
contrôler deux moteurs CC à partir d'une sortie PWM d'un
microcontrôleur (Arduino, DFRobot, etc).
Ce module est basé sur un L298N monté sur un refroidisseur
permettant une grande puissance de sortie. Il convient pour
les charges inductives tels que les solénoïdes, les relais ou les
moteurs.
Alimentation:
- partie logique: 6 à 12 Vcc
- partie moteur: 4,8 à 46 Vcc
Sortie: 2 A par canal
Puissance maxi: 25 W
Signal de commande:
- Vitesse: PWM
- Sens de rotation: logique
Niveau de commande:
- 0,3 à 1,5 V: état bas
- 2,3 à Vcc: état haut
T° de service: -25 à +130 °C
Dimensions: 55 x 47 x 26 mm
Référence fabricant: DRI0002.

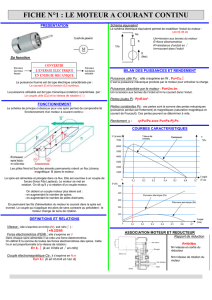
MOTEUR A COURANT CONTINU
TRANSFORMATION DE L’ÉNERGIE ÉLECTRIQUE EN ÉNERGIE MÉCANIQUE
VOCABULAIRE
En électrotechnique le stator s’appelle aussi inducteur et le rotor s’appelle l’induit

LE MAGNÉTISME

LE STATOR LE ROTOR ET LA MISE EN MOUVEMENT
 6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
1
/
22
100%