Approche inverse en traitement du signal

Introduction
Approches bayesiennes
Régularisations
Exemples
Annexes
Approche inverse en traitement du signal
Éric Thiébaut
Centre de Recherche Astronomique de Lyon
Université Claude Bernard Lyon I
École Normale Supérieure de Lyon
2017
Éric Thiébaut Problèmes inverses
Introduction
Approches bayesiennes
Régularisations
Exemples
Annexes
Exemples
Problème direct
Erreurs
Solution
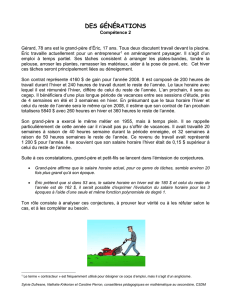
Exemple 1 : Formation d’image
formation d’image :
yi=Zh(ri−s)x(s)ds
| {z }
produit de convolution
+bi
objet : x(s)
réponse impulsionnelle (PSF) : h(r−s)
bruit : bi(au pixel n◦ià la position ri)
image observée : yi(au pixel n◦ià la position ri)
?+bruit →
Éric Thiébaut Problèmes inverses

Introduction
Approches bayesiennes
Régularisations
Exemples
Annexes
Exemples
Problème direct
Erreurs
Solution
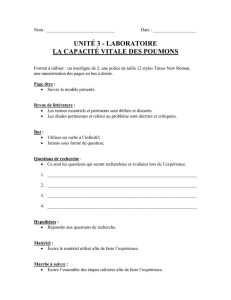
Exemple 2 : Tomographie
detecteur
source rayons X
modèle direct :
yi=ZLi
0
x(r∗+`ui) d`avec ui=ri−r∗
Li
et Li=kri−r∗k
où r∗et risont les position de la source et du ième pixel détecteur
Éric Thiébaut Problèmes inverses
Introduction
Approches bayesiennes
Régularisations
Exemples
Annexes
Exemples
Problème direct
Erreurs
Solution
Exemple 3 : Dynamique galactique
observables : distribution des vitesses Fφ(R, vφ)
modèle physique : dynamique disque galactique mince :
Fφ(R, vφ)=√2
0
Z
1
2v2
φ−ψ(R)
f(ε, R vφ)
qε+ψ(R)−1
2v2
φ
dε(transformée d’Abel)
inconnues : distribution des orbites f(ε, R vφ)
cinématique du gaz HI ⇒potentiel ψ(R)
Éric Thiébaut Problèmes inverses

Introduction
Approches bayesiennes
Régularisations
Exemples
Annexes
Exemples
Problème direct
Erreurs
Solution
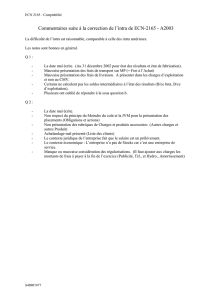
Exemple 4 : Reconstruction de phase
image observée phase dans la pupille
observables : image dans le plan focal ;
variables d’intérêt : phase dans le plan pupille
ϕ(s) = 2π
λ`(s)
avec `(s)et sla différence de marche et la position
dans la pupille ;
mesures (approximation champ lointain) :
yi=αZZ P(s) e i 2 π
λ[`(s)+hri,si/f]d2s
2
+bi
avec αune constante de normalisation, P(s)la
fonction pupille, rla position dans le plan focal et f
la distance focale.
Remarques :r/f est la direction angulaire et s/λ
est la fréquence spatiale associée.
Éric Thiébaut Problèmes inverses
Introduction
Approches bayesiennes
Régularisations
Exemples
Annexes
Exemples
Problème direct
Erreurs
Solution
Qu’est-ce qu’un problème inverse ?
Des observables disponibles et modélisables :
y=m(x) + b⇐=le modèle direct
les données y∈RM;
le modèle m:RN7→ RM;
les variables d’intérêt x∈RN;
les erreurs b∈RM.
Objectif : Retrouver les meilleurs paramètres xcompte tenu des
données yet du modèle m.
Étapes :
Contruire et analyser le modèle.
Établir un critère pour discriminer les meilleurs paramètres.
Élaborer une stratégie pour trouver la solution.
Éric Thiébaut Problèmes inverses

Introduction
Approches bayesiennes
Régularisations
Exemples
Annexes
Exemples
Problème direct
Erreurs
Solution
Le problème direct
Le problème direct consiste à construire le modèle des mesures
connaissant l’objet d’intérêt, l’instrument et le détecteur :
y=m(x) + b⇐=le modèle direct
Remarques :
le nombre de mesures est fini : M < ∞mais le nombre de paramètres peut
être arbitrairement grand : N≤ ∞ pratique Nest nécessairement fini ;
les mesures (et les paramètres) peuvent être hétérogènes ;
la partie déterministe du modèle, m(x), est connue mais peut être
arbitrairement compliquée (e.g. non-linéaire) ;
le terme non déterministe bprend en compte le bruit de mesure, les erreurs
de modélisation, etc ;
pour simplifier, nous supposerons que les variables aléatoires bsont
centrées au sens où :
E(b|x) = 0ou, au moins, E(bi|x)pVar(bi|x) ;
Exercice 1 : Montrer que
E(b|x}=0=⇒E(b) = 0.
Conséquences ?
Éric Thiébaut Problèmes inverses
Introduction
Approches bayesiennes
Régularisations
Exemples
Annexes
Exemples
Problème direct
Erreurs
Solution
Deux exemples de modèles linéaires (1/2)
Intégrale de Fredholm du 1er ordre (transformée d’Abel, réponse
instrumentale linéaire, projection, ...) :
yi=m(ri) + bi=Zh(ri,s)x(s) ds+bi
Discrétisation :
yi≈X
j
h(ri,sj)x(sj) ∆sj+bi=X
j
Hi,j xj+bi
avec xj≡x(sj)et Hi,j ≡h(ri,sj) ∆sj. En notation vectorielle :
y=H·x+b
Éric Thiébaut Problèmes inverses

Introduction
Approches bayesiennes
Régularisations
Exemples
Annexes
Exemples
Problème direct
Erreurs
Solution
Deux exemples de modèles linéaires (2/2)
Représentation de l’objet d’intérêt sur une base de fonctions :
x(s) = X
j
fj(s)xj.
Modèle direct :
yi=Zh(ri,s)x(s) ds+bi
=Zh(ri,s)X
j
fj(s)xjds+bi
=X
jZh(ri,s)fj(s) ds
| {z }
Hi,j
xj+bi
=X
j
Hi,j xj+bi
On retrouve que :
y=H·x+b
Éric Thiébaut Problèmes inverses
Introduction
Approches bayesiennes
Régularisations
Exemples
Annexes
Exemples
Problème direct
Erreurs
Solution
Modèle linéaire / non-linéaire
1modèle linéaire :
y=H·x+b
intégrale de Fredholm du 1er ordre (transformée d’Abel, convolution, ...) ;
base de fonctions ;
2modèle non-linéaire :
y=m(x)+b
tout ou partie du noyau h(r,s)à retrouver : déconvolution aveugle, synthèse
spectrale, ...
mesures de corrélation (à 2 ou 3 points)
restoration de phase : cristallographie, clôtures de phases (interférométrie),
...
⇒unicité ?
Éric Thiébaut Problèmes inverses
 6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
1
/
39
100%