Note d`application simulation numérique

Note d’application
Simulation numérique
Nicolas MOREAU" " " " " " " " 2010
Polytech’Clermont-Ferrand
Génie électrique


3
1.Présentation générale
Le logiciel de calculs numériques Matlab associé au programme Simulink permet
de modéliser et de simuler de nombreux systèmes dans la plupart des domaines de
l’ingénierie.
Ce programme de simulation offre de nombreuses bibliothèques de composants
usuels. De plus, le logiciel permet de simuler des systèmes continus ou
échantillonnés. Afin de ce familiariser avec Simulink, de nombreux éxemples sont
disponibles dans l’aide.
La saisie des systèmes est réalisée grâce à une interface graphique. De nombreux
outils de mesure permettent de visualiser les paramètres que l’utilisateur souhaite
visualiser.
Le contrôle des systèmes peut être réalisé soit au moyen de portes logiques soit en
intégrant des fonctions qui permettent de coder en langage de programmation dédié
l’ensemble de vos algorithmes.
2.Prise en main de l’interface
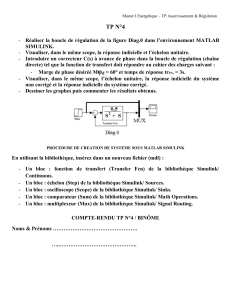
Sur l’interface Matlab, lancez Simulink à l’aide de l'icône ou en sélectionnant
«File > New > Model» dans la barre des tâches.

4
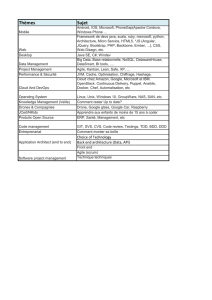
Une fois le nouveau modèle ouvert, ouvrez la librairie pour placer les composants
souhaités. Selon les versions, la procédure peut varier légèrement.
Dans la barre sélectionner «View > Simulink Library» pour voir les composants
usuels.
Le cadre rouge regroupe l’essentiel pour les modélisations de systèmes
électroniques et électriques. Le tracé de vos mesures est réalisé en connectant un
«Scope» disponible dans la rubrique «Sinks». Tous les composants sont accessibles
en double cliquant sur une rubrique.
Des composants peuvent êtres ajoutés à la librairie de base à partir de la barre
«View > Model Explorer» vous obtiendrez sur cette même page une aide pour
chaque composant.
Nous allons voir sur un exemple quelques fonctions de base.

5
3.Exemple de simulation
À partir d’un exemple, nous allons voir plus en détail quelques fonctionnalité de
l’interface Simulink.
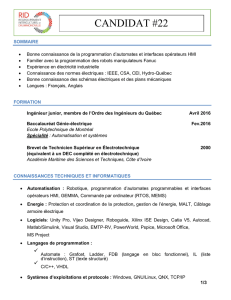
Cette présentation n’est pas exhaustive mais regroupe les fonctions de base de la
simulation numérique d’un système électronique commandé à partir d’un algorithme
de commande de type machine à états.
Ci-dessus le système complet que nous allons étudier plus en détail.
 6
7
8
9
10
11
12
6
7
8
9
10
11
12
1
/
12
100%