tp n°1 : chute sur un plan incline

6
T
TP
P
N
N
°
°1
1
:
:
C
C
H
HU
UT
TE
E
S
SU
UR
R
U
UN
N
P
PL
LA
AN
N
I
IN
NC
CL
LI
IN
NE
E
-
-
C
C
O
OL
LL
LI
IS
SI
IO
ON
NS
S
Durée du TP : 4h
1. MATERIEL
Banc
Un banc muni d’une graduation est installé sur la table. Bien fixer les butoirs à ses extrémités.
On veillera à arrêter les mobiles avant qu’ils ne les percutent.
Mobiles
On dispose de mobiles à roulettes sur lesquels on peut poser une ou deux surcharges. Les
mobiles contiennent des aimants puissants d’un côté et ne doit pas être approché des appareils
électroniques.
Une réglette transparente, de masse environ égale à 13,3 g, peut être fixée dans des
encoches sur le mobile à roulettes.
Mesureur, capteur
On déterminera les vitesses et les accélérations à l’aide du mesureur (Smart Timer), d’un
capteur (en forme de portique) qu’on branchera sur le mesureur, et de la réglette. Selon sa hauteur
(réglable), le capteur détecte le passage de la « fourchette » à deux ou trois « dents », ou du
« râteau » imprimés sur la réglette. La distance entre les dents étant connue, la différence des
temps de passage de deux dents successives devant le capteur permet de mesurer la vitesse
« instantanée ». Le passage d’une troisième dent devant le capteur permet de mesurer une
accélération.
Le mesureur possède trois touches de couleurs différentes :
Select Measurement (touche rouge)
: sélection
verticale du type de mesure :
Mesure d’une vitesse instantanée : choisir le type « Speed ».
La fourchette à deux dents devra passer devant le capteur.
Le résultat est en cm.s
-1
.
Mesure d’une accélération :
choisir le type « Accel ».
La
fourchette à trois dents devra passer devant le capteur. Le
résultat est en cm.s
-2
. Le mesureur fournit également le
signe.
Select Mode (touche bleue)
: sélection horizontale
du mode de mesure. Choisir le mode One Gate.
Start/Stop (touche noire)
: déclenchement de la
mesure. On entend un bip et une étoile apparaît sur l’écran.
Pour faire une autre mesure, appuyer à nouveau sur cette
touche.
2. CHUTE SUR UN PLAN INCLINE
2.1. F
ROTTEMENTS SOLIDES
/
FLUIDES
2.1.1. F
ROTTEMENTS SOLIDES
Dans le cas du frottement entre un support
et un corps solide, la force de frottement
correspond à la réaction tangentielle
T
R du
support sur le corps. En se plaçant dans le
référentiel du support, on peut distinguer deux
cas : statique (corps au repos) et cinétique (ou
dynamique ; corps en mouvement).

7
Cas statique : T
R s’oppose au mouvement que le corps tendrait à acquérir si T
R était nulle. Sa
norme obéit à l’inégalité : NsT RfR , où N
R est la réaction normale et s
f est le coefficient
de frottement statique.
Cas cinétique :
T
R s’oppose au mouvement. Sa norme obéit à l’égalité : NcT RfR , où c
f est
le coefficient de frottement cinétique.
N.B. : on a sc ff 0.
2.1.2. FROTTEMENTS FLUIDES
La force de frottement est en sens opposé de la vitesse du corps par rapport au fluide. Sa
norme croît avec la vitesse.
2.2. MESURES ET REGLAGES PRELIMINAIRES
2.2.1. MESURE DE L’INCLINAISON DU BANC
Le banc est incliné d’un angle
5 par rapport à l’horizontale. L’angle mesuré par le
rapporteur et le fil à plomb est assez imprécis. On cherche alors à déterminer plus précisément
en mesurant la différence de hauteur, h, entre les deux extrémités du banc.
Sachant que pour des angles faibles
ta
n
si
n
, donner
l’expression de en fonction de h et L (la longueur du banc).
Quelle est l’unité de l’angle calculée avec cette relation ?
Mesurer .
2.2.2. REGLAGE DE LA HAUTEUR DU CAPTEUR
Si le capteur est à la bonne hauteur pour mesurer une vitesse, il devrait suffire de retourner la
réglette pour pouvoir mesurer une accélération.
Régler le capteur de manière à ce qu’il soit à la même hauteur que la « fourchette » à deux dents.
Vérifiez qu’en retournant la réglette le capteur passe bien devant la « fourchette » à trois dents et
non devant le « râteau ». Sinon ajuster le réglage.
table
h
L

8
2.3. ÉTUDE DE LA CHUTE SANS FROTTEMENT
On étudie la chute, supposée sans frottement, d’un mobile à roulettes sur un banc incliné. On
repère la position du capteur et du mobile par leur abscisse x le long du banc. On négligera la
rotation des roues dans l’équation du mouvement et le bilan énergétique.
2.3.1. MESURE DIRECTE DE L’ACCELERATION
Montrer que dans le cas d’un mouvement sans frottement sur le plan incliné l’accélération
s’écrit :
a
=
g
sin avec g l’accélération de la pesanteur.
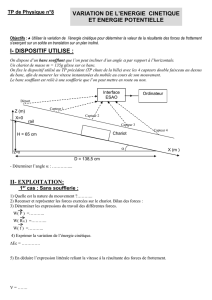
Le capteur est placé en aval du banc (abscisse
c
x)
On lâche le mobile plusieurs fois de la même hauteur (on
fera au moins 7n mesures), sans vitesse initiale (v = 0).
On choisira une abscisse x0 de départ à quelques dizaines
de centimètre (1) en amont de
c
x. Mesurer à chaque fois
l’accélération i
a (
n
i1) au niveau du capteur.
Qu’observe-t-on ?
On rappelle qu’une bonne estimation d’une quantité a mesurée n fois, de manière indépendante
et dans des conditions identiques, est donnée par sa moyenne
n
i
i
a
n
a
1
1
et que on a 95 % de chances de se trouver dans l’intervalle
aa,aa
, où l’incertitude vaut
2
1
2
1
2)a(na
n
an
ii
.
Déterminer la valeur de l’accélération
a
et son incertitude.
N.B. : Pour éviter des problèmes numériques (terme négatif sous la racine), on gardera pour
le calcul de a une bonne précision sur
a
.
L’accélération en l’absence de frottement s’écrit
a
=
g
sin. En utilisant la détermination précise
de l’accélération de la pesanteur -2
scm g 981
0, calculer la valeur de l’accélération attendue a0.
Votre mesure est-elle en accord avec cette valeur ? Si ce n’est pas le cas, en donner une explication.
2.3.2. MESURE DIRECTE DE L’ACCELERATION CORRIGEE DES FROTTEMENTS
Les mesures précédentes ont été réalisées avec un mouvement descendant du chariot. Les
valeurs de l’accélération obtenues sont systématiquement inférieures à
g
sin. Réaliser maintenant
4 à 5 mesures de l’accélération en lançant le chariot vers le haut et en prendre la moyenne que l’on
notera a. Le signe obtenu est-il pertinent ? Comparer la valeur absolue de a à g sin.
(1) La valeur précise importe peu, mais il est préférable de ne pas lâcher le mobile de trop haut, car la mesure de
l’accélération peut être faussée quand la vitesse au niveau du capteur est trop grande.
0
v=0
x
0
xc
x
Hauteur
du capteur
Mesure de la vitesse Mesure de l’accélération

9
On suppose que la force de frottement F est constante durant le mouvement (frottement de type
solide). A l’aide des lois du mouvement donner l’accélération attendue lorsque le mobile monte (
a
)
ou descend (a). Montrer alors qu’une meilleure estimation de
g
sin s’obtient en calculant la
moyenne (
a
+a)/2.
2.3.3. VERIFICATION DU THEOREME DE L’ENERGIE CINETIQUE : MESURE INDIRECTE
DE L’ACCELERATION
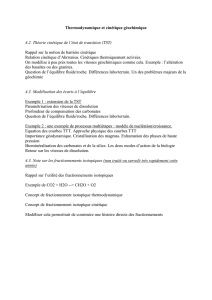
On lâche le mobile sans vitesse initiale d’une abscisse xi. On
mesure sa vitesse vi au niveau du capteur situé à l’abscisse xc.
Montrer, en utilisant le théorème de l’énergie cinétique, que
la vitesse vi vérifie la relation :
ii sav 2
2
avec a l’accélération et si = xc – xi la distance parcourue par le
mobile.
Lâcher le mobile sans vitesse initiale de différentes positions xi (xi désigne le milieu de la réglette)
et mesurer la vitesse i
v au niveau du capteur. Reporter xi, la distance parcourue i
c
ixxs et i
v
dans un tableau. On fera au moins 10 mesures, bien espacées le long du banc.
On veut déterminer graphiquement, en utilisant ces mesures, si le théorème de l’énergie cinétique
est bien vérifié au cours du mouvement.
Quelles sont les « bonnes » variables à utiliser en abscisse et en ordonnée qui permettent de tracer
une courbe simple ? Faire le graphique sur une feuille de papier millimétré et en déduire la valeur
de l’accélération a. L’ordonnée à l’origine est-elle nulle ? Si ce n’est pas le cas, quelle peut en être
la cause ?
La valeur de a obtenue par cette méthode indirecte est-elle cohérente avec celle du 4.1.? Le
théorème de l’énergie cinétique est-il vérifié ?
3. COLLISIONS
3.1. INTRODUCTION
La conservation de la quantité de mouvement ( vmp ), déduite des lois de Newton, a
révolutionné l’aéronautique au XXème siècle. En effet, jusqu’en 1940, les avions étaient équipés de
moteur à piston actionnant des hélices, celles – ci en brassant l’air créent une portance permettant
à l’avion de voler. Cette propulsion limitait la vitesse des avions ainsi que les altitudes atteintes,
sans parler des quantités énormes de carburant qu’exigeait ce type de moteur. Durant la seconde
guerre mondiale, et au moment où les britanniques mettaient au point le radar (système qui utilise
les ondes radio pour détecter et déterminer la distance et/ou la vitesse d'objets), les allemands
s’intéressaient à la propulsion par réaction ; à la fin de la guerre l’avion propulsé par des moteurs à
réaction était né. Le principe de ces moteurs consiste à éjecter des gaz à très grande vitesse. Mais
comment un gaz éjecté peut il lancer un avion ou une fusée ?
C’est là qu’intervient l’incontournable « principe » de la conservation de la quantité de
mouvement : dans le cas d’un avion (ou d’une fusée) éjectant un gaz, les molécules sortantes
emportent une certaine quantité de mouvement dans une direction, l’avion acquérant alors de la
quantité de mouvement dans la direction opposée (c’est ce que l’on appelle la poussée) ; au final, le
bilan global de la quantité de mouvement totale du système {gaz + avion} est conservée.
Quelques exemples de la vie courante pour mieux illustrer la conservation de la quantité de
mouvement :
Un enfant, sur une planche à roulette, qui lance un ballon dans un sens, va reculer en sens
inverse ;
Un homme qui tire une balle avec un fusil : quand la balle sort, l’homme à un mouvement de
recul ;
- Le ballon de baudruche qui se dégonfle : le ballon prend un sens inverse du sens d’expulsion
de l’air.
0
v=0
x
i v=
v
i
xc
si
x

10
3.2. RAPPELS PRELIMINAIRES
Par définition, un choc est une interaction de courte durée entre deux ou plusieurs corps
se rapprochant l’un de l’autre. Pendant le choc il y a transfert de quantité de mouvement et
d’énergie, les vitesses et directions des partenaires du choc sont alors modifiées. Les deux corps
n’entrent pas nécessairement en contact, il suffit qu’une interaction ait lieu lorsque les corps sont
proches. Par exemple, dans ce TP, les voitures sont équipées d’aimants qui permettront de réaliser
des chocs sans que celles-ci se percutent (les aimants se repoussent).
3.2.1. ÉQUATION VECTORIELLE DE LA CONSERVATION DE LA QUANTITE DE
MOUVEMENT
Considérons le choc entre deux mobiles M1 et M2. D’après la 3ème loi de Newton (loi de
l’action et de la réaction) 2112 FF , si le système {M1, M2} est isolé (aucune force extérieure
exercée sur le système) ou pseudo-isolé (les forces extérieures se compensent), la 2nd loi de
Newton s’écrit :
t
d
ppd
t
d
vmvmd
amamF 21
M ,Mext 21
2211
2211
0
On a donc conservation de la quantité de mouvement totale du système :
fi pp soit : 2121 ffii pppp 1
Remarque importante : la conservation de la quantité de mouvement est une équation vectorielle.
Si on note 1i
V et 2i
V les vitesses (vectorielles) des deux mobiles avant le choc et 1f
V et 2f
V les
vitesses après le choc, alors la relation vectorielle de conservation de la quantité de mouvement du
système implique que :
22112211 ffii VmVmVmVm
Pratiquement, il conviendra de « projeter » cette relation vectorielle sur l’axe selon lequel se fait le
mouvement des mobiles, afin d’obtenir une relation algébrique plus facile à manipuler :
1 Les indices i et f indiquent respectivement la valeur des grandeurs « initiale » (i.e. avant le choc) et « finale » (i.e.
après le choc)
 6
7
8
9
10
6
7
8
9
10
1
/
10
100%