Traitement des données hyperspectrales par des méthodes de

Journées d’Animation Scientifique (JAS09) de l’AUF Alger Novembre 2009
Résumé—Dans cet article, nous examinons la faisabilité et les
perspectives des méthodes de séparation aveugle de sources
pour le traitement des données hyperspectrales de
télédétection spatiale. L’imagerie hyperspectrale offre une
information plus riche, permettant ainsi une analyse plus fine
des observations. Afin de tirer profit de cette grande quantité
de données, de nouvelles méthodes d’analyse et de traitement
doivent être développées. Les méthodes de séparation aveugle
de sources peuvent répondre à ce besoin, notamment pour la
recherche des signatures spectrales des composants purs
présents dans la scène imagée.
Mots clefs — Télédétection hyperspectrale, séparation aveugle
de sources, analyse en composantes indépendantes,
factorisation en matrices non-négatives, mélange/démélange
spectral.
I. INTRODUCTION
Les avancées technologiques en matière de capteurs
satellitaires ont permis l’essor de l’imagerie hyperspectrale.
Celle-ci consiste en l’acquisition simultanée d’images dans
de nombreuses bandes spectrales étroites et contiguës.
Ainsi, les données hyperspectrales offrent une information
plus riche d’une scène que les autres types de données de
télédétection acquises en bandes spectrales larges et non
contiguës.
La résolution spectrale qu’offre l’imagerie hyperspectrale
permet l’accès à une signature plus détaillée des objets
présents dans la scène observée, mais cette avancée en
matière de résolution spectrale n’ira pas sans poser de
problèmes au niveau de la résolution spatiale. En effet, la
conception d’un capteur satellitaire passe inévitablement
par un compromis entre la résolution spatiale et la
résolution spectrale. Plus la résolution spectrale est fine,
plus la résolution spatiale est faible, et vice versa.
L’imagerie hyperspectrale fournit donc des pixels plus
hétérogènes se prêtant moins bien à l’analyse spectrale.
Ainsi, les images hyperspectrales peuvent être considérées
comme un ensemble de signaux 1D, fonction de la longueur
d’onde, chacun associés à point de l’espace : chaque
vecteur associé à un pixel de l’image hyperspectrale est
considéré comme un mélange des signatures spectrales (ici,
on parle de mélange spectral) des composants purs
contenus dans la zone associée à ce pixel [8].
A l’aide des méthodes de Séparation Aveugle de Sources
(SAS), on peut espérer démélanger chaque pixel, et aboutir
à l’identification de la signature spectrale de chaque
composant pur, permettant ainsi la quantification des
constituants de surface et la cartographie de leur
distribution spatiale.
La SAS est un problème générique de traitement de
signaux, d’images ou de données. Elle consiste à estimer un
ensemble de signaux sources inconnus à partir d’un
ensemble de signaux observés qui sont des mélanges de ces
signaux sources [7].
Historiquement, pendant quelques années, la SAS s’est
identifiée à l’Analyse en Composantes Indépendantes (ACI)
dans le cadre de mélanges linéaires instantanés [3].
L’ACI consiste à représenter les observations initiales
comme un mélange linéaire instantané de composantes
statistiquement indépendantes [7].
Bien sûr, l’ACI n’est pas la seule voie possible pour
résoudre le problème de la SAS. D’autres méthodes,
notamment celles basées sur l’exploitation du caractère non
négatif des sources, permettent de résoudre le problème de
la SAS par l’utilisation de la Factorisation en Matrices
Non-négatives (FMN) [5].
La FMN consiste à représenter les observations initiales
comme un mélange linéaire à coefficients non négatifs de
composantes non négatives [9].
La suite de cet article est constituée de six sections. Nous
donnons dans la section II une description de l’imagerie
hyperspectrale, et nous décrivons le problème du mélange
spectral. Dans la section III, nous présentons le domaine de
la séparation aveugle de sources. Dans les deux sections
suivantes, nous donnons respectivement deux solutions
pour la SAS, d’une part l’ACI, et d’autre part la FMN.
Avant de conclure, nous discutons dans la section VI, la
faisabilité et les perspectives d’utilisation des méthodes de
SAS pour le traitement des images hyperspectrales.
Traitement des données hyperspectrales par des méthodes de
séparation aveugle de sources : faisabilité et perspectives
M. S. Karoui1,2,3, Y. Deville2, S. Hosseini2, A. Ouamri3
1 Division Observation de la Terre, Centre des Techniques Spatiales,
01, Av. de la Palestine, BP 13, 31200, Arzew, Algérie
E.mail : [email protected]
2 Laboratoire d’Astrophysique de Toulouse-Tarbes, Université de Toulouse, CNRS,
14 Av. Edouard Belin, 31400 Toulouse, France
E.mail : [email protected], [email protected]
3 Laboratoire Signaux et Images, Université des Sciences et de la Technologie d’Oran,
BP 1505, El M’naouar, 31000 Oran, Algérie
E.mail : ouamri@univ-usto.dz

Journées d’Animation Scientifique (JAS09) de l’AUF Alger Novembre 2009
II. IMAGERIE HYPERSPECTRALE
2.1. Description
Chaque matériau présente une réflectivité spectrale unique
basée sur ses propriétés telles que sa composition chimique
et physique, sa température, sa texture, etc. Cette réflectivité
spectrale, qui est souvent appelée signature spectrale, peut
être considérée comme la source à partir de laquelle les
caractéristiques chimiques et physiques peuvent être
retrouvées.
Les images de télédétection spatiale classiquement utilisées
sont dites multispectrales. Elles associent à chaque pixel
plusieurs valeurs scalaires qui correspondent à la mesure du
rayonnement électromagnétique incident sur le capteur dans
quelques bandes spectrales déterminées.
On parle d’images hyperspectrales lorsque l’acquisition de
ce rayonnement est faite simultanément dans un grand
nombre de bandes spectrales étroites et contiguës. Les
données hyperspectrales fournissent une information plus
détaillée des propriétés spectrales d’une scène que les
données de télédétection plus conventionnelles acquises en
bandes plus larges et souvent non contiguës.
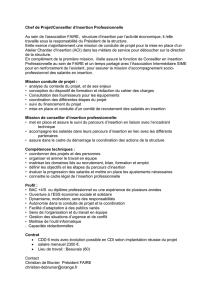
Une image hyperspectrale peut être considérée comme un
cube 3D de données, c’est-à-dire des mesures fonctions de
la position XY de l’espace observé et de la longueur
d’onde.
Une image de ce type est appelée « pavé hyperspectral » ou
« hypercube » (Fig. 1).
Fig.1 Représentation d’un pavé hyperspectral
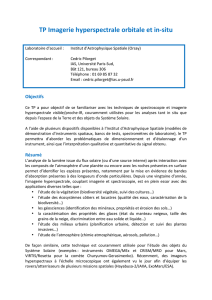
A chaque pixel d’une image hyperspectrale est alors associé
un vecteur de mesures formant un spectre (Fig. 2). Ainsi,
nous pouvons discriminer entre certaines cibles ayant des
signatures spectrales similaires, alors que ces différences
spectrales peu perceptibles ne sauraient être observées dans
les signatures spectrales acquises par les capteurs à larges
bandes spectrales comme celles de l’imagerie
multispectrale.
Fig.2 Concept de l’imagerie hyperspectrale
L’imagerie hyperspectrale est utilisée dans des domaines
divers, pour des applications civiles et militaires. Parmi les
applications civiles, on peut citer entre autres, la géologie,
l’exploration minière et pétrolière, l’agriculture de
précision, l’hydrologie, etc. L’exploitation des données
hyperspectrales permet d’effectuer des classifications d’une
précision inégalée en télédétection conventionnelle.
2.2. Le problème du mélange spectral
Généralement, les images sont acquises sur des scènes
hétérogènes dans lesquelles plusieurs constituants sont
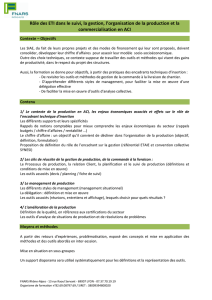
présents. En imagerie hyperspectrale, le problème du
mélange spectral se pose lorsque le domaine élémentaire
relatif à un pixel donné comporte plusieurs matériaux
(Fig. 3), c'est-à-dire lorsqu’on atteint les limites de
résolution spatiale du capteur. Ainsi, chaque pixel de
l’image contient plusieurs composants purs dont les
spectres respectifs contribuent au spectre observé. Le
démélange spectral est la procédure par laquelle le spectre
mesuré est décomposé en une série de spectres purs et
d’abondances respectives [8].
Le modèle analytique le plus couramment utilisé pour
résoudre le problème du mélange spectral dans le domaine
réflectif est de type linéaire [8].
Fig.3 Illustration du problème du mélange spectral

Journées d’Animation Scientifique (JAS09) de l’AUF Alger Novembre 2009
Le modèle définit le spectre xp observé dans N bandes au
niveau du pixel p comme une combinaison linéaire des
spectres sj des L composants purs présents dans la scène :
xp = ∑
=
L
j
jpj sa
1
, ∑
=
=
L
j
pj
a
1
1, (1)
où xp= [xp(1), xp(2), …, xp(N)] et sj = [sj(1), sj(2), …, sj(N)]
sont deux vecteurs lignes, représentant respectivement le
spectre observé au niveau du pixel p, et le spectre
du jème composant pur. Le scalaire positif apj représente
l’abondance du jème composant pur dans le pixel p. La
somme des abondances des composants purs présents dans
le même pixel est bien entendu égale à 1.
III. SEPARATION AVEUGLE DE SOURCES
L’approche dite de séparation aveugle de sources consiste à
restaurer des signaux sources sj à partir de signaux
mélangés xi (appelés aussi observations). De manière
générale, ces observations peuvent provenir de capteurs,
tels que des microphones, des antennes radiofréquences, des
capteurs CCD… Le mélange entre les signaux sources est
dû à la propagation de ces derniers jusqu’aux capteurs.
L’objectif est donc de construire un système capable de
fournir des sorties yj égales aux signaux sj (à des
indéterminations près) [7]. La configuration générale pour
la séparation de sources est représentée en Fig. 4. Le mot
« aveugle » provient du fait que les sources et les
paramètres du mélange sont inconnus.
Fig.4 Configuration générale pour la séparation de sources
La SAS possède plusieurs degrés de difficulté. Divers
paramètres sont à prendre en considération. Le premier
paramètre est le nombre K d’observations par rapport au
nombre L de sources. Intuitivement, on conçoit aisément
que le cas (sur)déterminé : K=L (K>L) est plus simple à
résoudre que le cas sous-déterminé : K<L, car les
observations fournissent une information plus riche dans le
cas (sur)déterminé.
Le deuxième paramètre concerne le type de mélange. Le cas
le plus étudié à ce jour est le mélange linéaire instantané :
x = As, (2)
où x = [x1, …, xK]T et s = [s1, …, sL]T sont deux vecteurs
colonnes, représentant respectivement l’ensemble des
signaux d’observations et l’ensemble des signaux sources,
et A est une matrice constante inconnue dite de mélange.
Une approche classique pour le mélange linéaire instantané
consiste à transférer les observations dans un système qui
inverse la matrice de mélange A afin de restaurer les
sources. La difficulté provient du fait que la matrice de
mélange est inconnue, ce qui revient à inverser une matrice
inconnue.
Cette difficulté nous amène à déterminer une estimation Â-1
de l’inverse de la matrice de mélange A-1, pour en déduire
par la suite une estimation des sources en transférant les
observations dans le système qui réalise la matrice Â-1. On
obtient alors :
y = Â-1x = Â-1As = ŝ ≈ s. (3)
Fig.5 Approche classique pour les mélanges linéaires
L’estimation de A-1 ou d’une grandeur associée
(par exemple A pour en déduire ensuite une estimation
de A-1) est faite à partir des seules observations en utilisant
les seules hypothèses faites sur les sources. Les méthodes
de séparation de sources les plus utilisées sont fondées sur
l’Analyse en Composantes Indépendantes (ACI). Elles
supposent l’indépendance statistique des sources. Ainsi, le
système de séparation fournit une solution unique avec des
sorties indépendantes (à des indéterminations d’échelle et
de permutation près, détaillées ci-dessous). Une autre
approche basée sur la Factorisation en Matrices Non-
négatives (FMN), et qui suppose la non négativité des
sources et des coefficients de mélange permet de résoudre
le problème de séparation de sources. Mais les méthodes de
FMN les plus simples souffrent du problème de la non
unicité de la solution. L’unicité (aux permutations et
facteurs d’échelle positifs près) n’est obtenue que sous
certaines conditions supplémentaires [4].
Dans l’approche d’ACI citée précédemment, on peut
distinguer les indéterminations suivantes :
• La contrainte d’indépendance est vérifiée non seulement
dans le cas où les sorties sont égales aux sources, mais
aussi dans le cas où elles correspondent à une version
permutée des sources.
• Cette contrainte d’indépendance reste vérifiée dans le
cas où les sorties sont proportionnelles aux sources.
Bien que fondée sur des principes différents, la FMN
conduit elle aussi à des indéterminations de permutation et
de facteurs d’échelle (mais ces derniers peuvent alors être
réduits à des facteurs positifs).

Journées d’Animation Scientifique (JAS09) de l’AUF Alger Novembre 2009
IV. ANALYSE EN COMPOSANTES INDEPENDANTES
L’analyse en composantes indépendantes peut être vue
comme un prolongement de l’Analyse en Composantes
Principales (ACP), mais dans lequel la non corrélation est
remplacée par une hypothèse d’indépendance statistique et
de non-Gaussianité des sources pour les méthodes d’ACI
les plus classiques, tandis que certaines méthodes d’ACI
exploitent l’autocorrélation ou la non-stationnarité des
sources. Les méthodes d’ACI qui n’exploitent que la
non-Gaussianité exigent que toutes les sources soient
non-Gaussiennes sauf une au plus [7]. En effet, dans le cas
Gaussien, la décorrélation des sorties ou l’ACI ne
garantissent pas la restitution des sources. Dans le cas
non-Gaussien et dans le cadre d’un mélange linéaire
instantané et déterminé, Comon [3] a démontré que l’ACI
est équivalente à la SAS.
L’ACI d’un vecteur aléatoire x
∈
RK consiste à estimer le
modèle génératif de données x=As, avec A∈RK x K, de telle
manière que les composantes de s∈RL soient aussi
indépendantes que possible.
Le vecteur s a des composantes mutuellement
indépendantes si et seulement si la densité de probabilité
conjointe f(s) est factorisable par les densités de probabilité
marginales fj(sj) :
f(s) =∏
=
L
j
jj tsf
1
))(( . (4)
Les sources sj ne sont pas directement observables et leurs
densités de probabilité fj(sj) sont rarement connues. Il est
donc difficile d’utiliser la définition d’indépendance (4)
pour estimer les sources indépendantes. Cette difficulté
nous impose la définition d’une mesure de l’indépendance
statistique.
Une mesure permettant de caractériser directement
l’indépendance entre des variables aléatoires est
l’« information mutuelle ». Cette quantité définie dans [7]
vaut zéro lorsque les variables aléatoires sont indépendantes
et est positive sinon, ce qui nous donne un moyen de
mesurer l’indépendance entre les variables aléatoires. Les
méthodes d’ACI basées sur cette mesure, minimisent
l’information mutuelle entre les sorties du système d’ACI.
La non-Gaussianité est un critère qui peut être aussi utilisé
pour mesurer l’indépendance statistique. L’algorithme
« FastICA » [6, 7], repose sur la maximisation de ce critère.
Les mesures de la non-Gaussianité les plus couramment
utilisées sont la valeur absolue du « kurtosis normalisé » et
la « néguentropie » issue de la théorie de l’information.
On trouve aussi dans la littérature d’autres algorithmes
permettant de résoudre le problème de la séparation dans le
cadre des mélanges linéaires instantanés. Ces algorithmes
reposent sur la diagonalisation conjointe approchée de
plusieurs matrices/tenseurs par une matrice unitaire [7].
Parmi ces algorithmes, on peut citer « JADE » (Joint
Approximate Diagonalization of Eigen-matrices) [2]. Ce
dernier réalise la séparation par la diagonalisation conjointe
approchée de tenseurs de cumulants. Un deuxième
algorithme appelé « SOBI » (Second Order Blind
Identification) [1] repose sur la même philosophie que
l’algorithme « JADE », mais en n’utilisant que les
statistiques d’ordre deux (matrices de covariance avec
retard), avec pour seules hypothèses : les sources sont
mutuellement non corrélées et chacune possède une
autocorrélation qui lui est propre.
L’ACI nécessite dans certains cas, deux prétraitements :
« centrage » et « blanchiment » des observations. Le
premier prétraitement consiste à imposer une moyenne nulle
aux composantes du vecteur des observations, le second
consiste à décorréler et à imposer une variance unité aux
composantes du vecteur des observations centrées.
V. FACTORISATION EN MATRICES NON-NEGATIVES
La factorisation en matrices non-négatives est une méthode
de réduction dimensionnelle introduite en 1999 par Lee et
Seung [9]. Initialement, la FMN a été formulée en
traitement d’images pour la reconnaissance des visages.
La factorisation en matrices non-négatives permet
d’approximer toute matrice V∈RK x N dont les éléments sont
tous non-négatifs (positifs ou nuls), grâce à une
décomposition de la forme [9] :
V ≈ W H, (5)
où W et H sont deux matrices qui appartiennent
respectivement à RK x L et RL x N avec L ≤ K ou N.
Dans le cas de la séparation aveugle de sources,
la matrice W est la matrice de mélange, et la matrice H est la
matrice composée des sources.
L’originalité de la FMN réside dans la contrainte de non
négativité qu’elle impose à W et H. Déterminer les matrices
W et H revient à minimiser une fonction objective de la
matrice initiale V et du produit des deux matrices W et H.
Lee et Seung [10] ont proposé deux méthodes basées sur la
minimisation de deux fonctions objectives différentes, sous
la contrainte de non-négativité. C’est un problème
d’optimisation non trivial que les deux auteurs proposent de
résoudre en initialisant les deux matrices W et H
aléatoirement, puis en alternant des règles de mise à jour
multiplicatives [10]. La première méthode est basée sur la
minimisation de la « distance euclidienne » entre V et WH,
la seconde est basée sur la minimisation de leur divergence
de « Kullback-Leibler ».
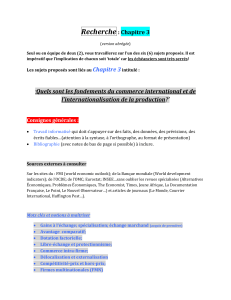
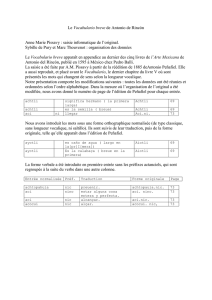
D’un point de vue géométrique, et d’après Donoho et
Stodden [4], la FMN consiste à trouver un cône appartenant
à l’orthant positif (l’orthant positif est l’extension de la
notion du quart de plan positif dans un espace de dimension
supérieure) qui englobe les composantes du vecteur de
données observées. De ce point de vue, le cône englobant
les composantes du vecteur de données observées n’est pas
unique sans contraintes supplémentaires. Une illustration en
deux dimensions est donnée en Fig. 6.

Journées d’Animation Scientifique (JAS09) de l’AUF Alger Novembre 2009
Fig. 6 Différents cônes englobant les composantes d’un vecteur de données
observées.
À partir de l’interprétation géométrique (Fig. 6), il apparaît
que la factorisation en matrices non-négatives n’est pas
unique. En effet, tout couple de matrices (W, H) vérifiant
l’approximation (5) constitue une solution pour la FMN, en
particulier pour toute matrice diagonale non négative et
inversible T, le couple (WT-1, TH) est aussi une
approximation non-négative qui vérifie (5) :
V ≈ W H = (WT-1) (TH) =W
~
H
~
. (6)
Une condition nécessaire d’unicité donnée par Donoho et
Stodden [4] est : les données ne doivent pas obéir à une
contrainte de stricte positivité.
VI. APPLICATION DE LA SAS EN TELEDETECTION
HYPERSPECTRALE
Dans cette section, nous ne donnons pas de résultats
expérimentaux : il est question seulement de présenter une
modélisation des données considérées et les perspectives
d’utilisation des méthodes de SAS en télédétection
hyperspectrale. Il s’agit d’envisager la faisabilité de
l’application des méthodes de SAS pour le traitement des
données hyperspectrales, et notamment pour résoudre le
problème du mélange spectral. La question qui se pose est
la suivante : conformément à la terminologie de la SAS,
qu’appelle-t-on « observations », et qu’appelle-t-on
« sources » en télédétection hyperspectrale ?
À partir du modèle de mélange linéaire, et lorsqu’une image
composée de K pixels est prise dans N bandes spectrales,
avec la présence de L composants purs, nous écrivons :
⎟
⎟
⎟
⎠
⎞
⎜
⎜
⎜
⎝
⎛
⎟
⎟
⎟
⎠
⎞
⎜
⎜
⎜
⎝
⎛
=
⎟
⎟
⎟
⎠
⎞
⎜
⎜
⎜
⎝
⎛
)N(s...)1(s
)N(s...)1(s
.
a...a
a...a
)N(x...)1(x
)N(x...)1(x
LL
11
KL1K
L111
KK
11
MOMMOMMOM . (7)
Avec une convention d’écriture évidente, nous aboutissons
à l’équation suivante :
..
...
... 1
1
1111
Asx
s
s
aa
aa
x
x
LKLK
L
K
=⇔
⎟
⎟
⎟
⎠
⎞
⎜
⎜
⎜
⎝
⎛
⎟
⎟
⎟
⎠
⎞
⎜
⎜
⎜
⎝
⎛
=
⎟
⎟
⎟
⎠
⎞
⎜
⎜
⎜
⎝
⎛
MMOMM (8)
Nous appelons alors « sources » les réflectances des
composants purs (chaque ligne de s correspond au spectre
d’un composant pur). Les réflectances des pixels de l’image
constituent les « observations » (chaque ligne de x
correspond au spectre d’un pixel).
6.1. Résolution par ACI
À partir de la modélisation (8), l’utilisation de l’analyse en
composantes indépendantes pour résoudre le problème du
mélange spectral paraît bien adaptée, sous réserve de
prendre en considération l’hypothèse de l’indépendance
statistique des sources. En effet, le caractère indépendant
des sources n’est pas toujours vérifié puisque les spectres
de composants différents de la même classe (classe
végétation par exemple), peuvent avoir de grandes
similitudes. Une approche envisageable pour résoudre ce
problème consiste à appliquer une transformation linéaire
aux observations. Les observations transformées ainsi
obtenues sont des mélanges linéaires instantanés des
sources transformées, suivant la même matrice de mélange
A que les signaux initiaux. Sous réserve qu’il existe une
transformation qui fournisse des sources transformées
indépendantes, les méthodes d’ACI peuvent être appliquées
aux signaux ainsi transformés afin de déterminer la matrice
de mélange A.
De plus, d’un point de vue applicatif, l’ACI est
habituellement utilisée pour un nombre d’observations
réduit, alors que dans notre configuration, le nombre
d’observations (nombre de pixels dans l’image) est
relativement élevé, ce qui peut engendrer un coût
calculatoire très important. Pour pallier ce problème, la
réduction de l’espace de travail (de préférence par ACP, ou
à défaut par prélèvement de quelques pixels sur l’image par
exemple) est préconisée. La dimension de l’espace après
cette réduction doit toutefois rester supérieure ou égale au
nombre de sources.
6.2. Résolution par FMN
Dans les applications de télédétection spatiale, les données
images possèdent la propriété de non-négativité. Les
solutions estimées par ACI ne vérifient pas nécessairement
cette condition et peuvent donc manquer d’interprétabilité
physique. Dans ce cas, les méthodes respectant le caractère
non-négatif des images sont préférables.
Partant de ce constat, et à partir de l’hypothèse de la
linéarité du modèle de mélange, l’utilisation de la
factorisation en matrices non-négatives paraît intéressante.
Néanmoins, comme nous l’avons souligné dans la section
V, la FMN souffre d’un problème majeur, celui de la non
unicité de la solution. Dans ce cas, l’ajout de contraintes
supplémentaires est préconisé.
 6
6
1
/
6
100%