elle pourra

Lycée La Fayette Page 1
CPGE ATS – cours de sciences industrielles (génie électrique)
Auteur : CAZADE Eric chap 3 : La machine à courant continu
Chapitre 3
La machine à courant continu
1
1.
.
I
IN
NT
TR
RO
OD
DU
UC
CT
TI
IO
ON
N
La machine à courant continu est totalement réversible : elle pourra fonctionner en moteur ou en
génératrice.
2
2.
.
C
CO
ON
NS
ST
TI
IT
TU
UT
TI
IO
ON
N
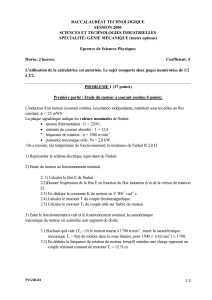
La vue en coupe fait apparaître deux parties principales : le stator (partie fixe) et le rotor (partie
tournante) :

Lycée La Fayette Page 2
CPGE ATS – cours de sciences industrielles (génie électrique)
Auteur : CAZADE Eric chap 3 : La machine à courant continu
1 : cornes polaires 6 : bobinage inducteur 11 : encoche rotorique
2 : carcasse 7 : pôles 12 : collecteur
3 : rotor 8 : axe x’x 13 : balai
4 : carcasse 9 : axe y’y
5 : entrefer 10 : conducteur de l’induit
Du point de vue électrique, nous avons aussi deux parties bien distinctes :
a) L'inducteur : (source de champ magnétique) situé au stator, il est constitué soit d'un
aimant permanent, soit d'un électro-aimant (bobines enroulées autour d'un noyau de fer).
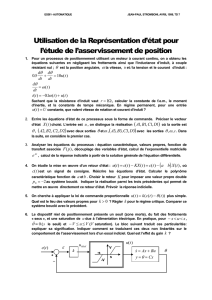
Nous allons nous intéresser maintenant à l’inducteur bobiné :
Le bobinage inducteur est traversé ar un courant continu constant j (appelé courant inducteur)
qui crée un champ magnétique
p
B
G
uniforme que l’on dirige avec la règle du bonhomme
d’Ampère ou la règle du tire-bouchon.
Les cornes polaires sont donc magnétisées et on peut faire apparaître un pôle Nord et un pôle Sud
(machine bipolaire).
Les pôles auxiliaires permettent
d’améliorer notablement la commutation au
niveau du collecteur (diminution des
étincelles). Ils sont alimentés par le courant
d’induit.

Lycée La Fayette Page 3
CPGE ATS – cours de sciences industrielles (génie électrique)
Auteur : CAZADE Eric chap 3 : La machine à courant continu
b) L'induit : situé au rotor, il est constitué d'un ensemble de conducteurs reliés de manière
"astucieuse ". (Les conducteurs diamétralement opposés sont reliés 2 à 2 pour former une spire
dont les extrémités sont reliées au collecteur).
Le collecteur est constitué de bagues conductrices où frottent 2 balais appelés charbon. Quel que
soit le type de bobinage l'induit se comporte comme une seule et même bobine lorsqu'il est alimenté
par les balais.
Les bobinages (spires) sont fermés
sur eux-mêmes :

Lycée La Fayette Page 4
CPGE ATS – cours de sciences industrielles (génie électrique)
Auteur : CAZADE Eric chap 3 : La machine à courant continu
3
3.
.
P
PR
RI
IN
NC
CI
IP
PE
E
D
DU
U
F
FO
ON
NC
CT
TI
IO
ON
NN
NE
EM
ME
EN
NT
T
E
EN
N
G
GE
EN
NE
ER
RA
AT
TR
RI
IC
CE
E
3.1. Champ magnétique créé par l’inducteur :
3.2. Existence d’une force électromotrice induite (f.é.m) :
Chaque spire de l’induit est soumise au champ B(
θ
) car l’induit est entraîné en rotation. Chaque
spire est donc le siège d’une force électromotrice induite (f.é.m.) alternative.
Si la rotation est uniforme, et comme le champ magnétique radial possède une forme sinusoïdale,
alors, la f.é.m induite sera aussi de forme sinusoïdale d’après la loi de Faraday :
dt
d
e
Φ
−= avec
()
SBSnBt ⋅=⋅⋅=Φ )(
θ
G
G
et t
Ω
=
θ
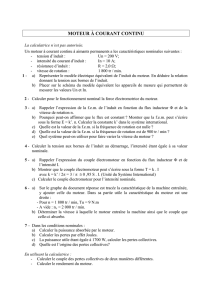
B
(
θ
)
NS
θ
Dans l’entrefer, la composante radiale du
champ magnétique vaut :
(
)
θ
θ
cos
M
BB
=
Ce champ est en effet maximal pour :
θ
= 0 ou
θ
= π
BM étant fonction du courant d’excitation j.
n
G étant la normale à la spire et S la surface de la spire.
donc ttSBe MM
Ω
⋅
Ω
⋅
=
Ω
⋅
Ω
⋅⋅= sinsin
φ
3.3. Rôle du collecteur et des balais :
Le collecteur est constitué d’un certain nombre de lames de cuivre isolées entre elles par du mica ; il
fait parti du rotor car il est entraîné en rotation.
Les balais par contre sont fixes et appartiennent au stator, mais ils sont en contact électrique avec
certaines lames du collecteur.

Lycée La Fayette Page 5
CPGE ATS – cours de sciences industrielles (génie électrique)
Auteur : CAZADE Eric chap 3 : La machine à courant continu
L’ensemble collecteur/balais joue le rôle de redresseur. En effet les spires fournissent chacune
une tension sinusoïdale déphasée par rapport à la précédente. Les balais en commutant de spire en
spire permettent de rester à un niveau maximum de tension.
3.4. Expression de la f.é.m :
La force électromotrice (valeur moyenne de u(t)) peut être mesurée aux bornes de l’induit avec un
voltmètre magnétoélectrique s’il n’y a pas de charge.
La force électromotrice s’exprime par :
(
)
jkE
Φ
⋅
Ω
⋅
=
'
E en volts (V)
Ω : vitesse angulaire en rad.s-1
k’ : constante de la machine
La vitesse angulaire Ω (en rad/s) est liée à la vitesse de rotation n (en tr/s) par : n
π
2=Ω
Souvent, nous sommes amenés à travailler à flux constant (en maintenant le courant d’excitation j
constant) ; alors la f.é.m est proportionnelle à la vitesse :
nKkE
⋅
=
Ω
⋅
=
avec kK
π
2
=
3.5. Représentation en régime permanent :
En régime permanent, l’induit est représenté par un générateur de tension de f.é.m E en série avec
une résistance R appelée résistance de l’induit.
L’inducteur est représenté sur le schéma par une bobine, mais comme ce bobinage est alimenté en
courant continu j, il est donc équivalent à une résistance appelée résistance d’inducteur.
 6
7
8
9
10
11
12
13
14
15
16
17
6
7
8
9
10
11
12
13
14
15
16
17
1
/
17
100%