d - Stud`Ant STAPS

Contrôle perceptivo-moteur
• Génération et régulation du mouvement
• Perception (afférence – sensoriel)
• Mouvement (efférence – moteur)
• Contrôle (perceptivo-moteur) Coordination
Réception d’information → traitement dans le cerveau → réalisation du mouvement
Depuis des siècles on cherche à comprendre ce qui se passe dans la tête, le
processus du mouvement humain. On arrive à faire reproduire par un robot les
mouvements humain. Cette conception se base par rapport à ce qu'on connaît sur les
mouvements de l'homme et du fonctionnement du cerveau.
Science du mouvement
Science du mouvement = kinésiologie +
psychologie
• kinésiologie = sciences du mouvement
• psychologie = science du comportement humain
Disciplines / méthodes :
• Biomécanique
• Biologie
• Psychologie expérimentale
• Psychologie cognitive
• Ingénierie
• Sciences de la complexité
• Neurosciences…
Quelques réflexions sur la science
Dans ces sciences il peut arriver qu'on rencontres différents problèmes, dans cette
étude du mouvement, il existe un problème avec le mouvement. Il nous faut l'étudier
mais sans rien de précis sur quoi nous appuyer, on ne peut pas avancer.
Ex : le cheval au galop, diverse représentation montre le cheval avec un sabot au
sol, 2, aucun, … nombreuse sont les représentation, mais qu'est-ce-qui est vrai dans

tous ça ? C'est grâce à une technologique suffisante qu'on va pouvoir décomposer
le mouvement comme la photo et la vidéo.
On a également un problème due à la perception. L’œil humain sélectionne ce qu'il va
regarder, et même lorsque on à l’œil sur la différence, 1 fois sur 2 on peut rater la
différence (d'après une étude).
Ex : Sur une image, 5 % de celle ci va être différente, pourtant tous le monde
n'arrive pas à le voir.
Et le dernier problème est celui du comportement, c'est à dire qu'il faut se méfier :
• de l'observation
• de l'intuition et l'introspection
• du bon sens commun
• de l'expertise
La science étudie « le comment » des choses qui se passes. Il faut donc appliquer,
objectivité, reproductibilité et généralité :
• Mesure (outils et méthodes)
• Description (statistiques)
• Inférence (statistiques)
• Lois (formalisme)
Un peu d'histoire
• Les origines :
◦1868 : chronométrie mentale (Donders)
◦1870 : neuropathologie motrice (Jackson)
◦1879 : premier labo de psychologie (Wundt)
◦1892 : propriétés du muscle (Blix)
◦1893 : covariation vitesse-courbure (Binet & Courtier)
◦1899 : compromis vitesse-précision (Woodworth)
• Les premiers développements :
◦1902 : « Les bases scientifiques de l’EP » (Demenij)
◦Années 30 : développement moteur (McGraw, Shirley, Gesell)
◦1937 : synergies neuro-biomécaniques (Bernstein)
◦1941 : USAF Psychomotor Testing Program (Melton)
• L’après-guerre :
◦1948 : « Cybernetics » (Wiener) • 1949 : « The Mathematical Theory of
Communication » (Shannon & Weaver)
◦1950 : copie d’efférence (von Holst)
◦1954 : loi de Fitts
◦1960-8 : le programme moteur (Henry, Keele)
• La période actuelle :
• 1970 : boucle gamma (Granit, Houk)
• 1971-1975 : mémoires de l’apprentissage moteur (Adams) et théorie des schémas
(Schmidt)

• 1972 : Central Pattern Generator (Grillner)
• Depuis 1984 : Théories dynamique de la coordination (Kelso, Turvey) et
écologique de la perception (Gibson)
• Depuis 1995 : Neurosciences intégratives (Bizzi, Georgopoulos, Jeannerod)
Psychophysique du mouvement
Caractéristiques générales du mouvement
Quelques notions de cinématique :
En physique, la cinématique est la discipline de la mécanique qui étudie le
mouvement des corps, en faisant abstraction des causes du mouvement
Définition :
• Déplacement :
◦Action de prendre quelque chose et de le placer ailleurs ; changer
d’endroit
◦(Géométrie : Une similitude qui conserve les distances et les angles
orientés)
• Mouvement : le déplacement d'un corps par rapport à un point fixe de l'espace et à
un moment déterminé (→ référentiel → mesure ) : changement de position (Xi)
au cours du temps.
• Trajectoire : la ligne décrite par n'importe quel point d'un objet en mouvement, et
notamment par son centre de gravité.
Mesure du mouvement
On va mesurer les informations obtenus par les positions successives du point
étudiée. On trace un graphique. On a donc une graphique qui définie la position en
fonction du temps. Cependant, ce n'est pas très précis :
• Quand le mouvement commence / s’arrête-t-il ?
• Comment la position évolue-t-elle ?
On peut à partir de ce graphique étudier la vitesse, on l'obtient de 2 manières différentes :
• par moyenne :
• par dérivé :formule
Celle ci correspond à la valeur de la pente pour une position du point.
À partir de ces donnés, on peut déterminer la duré du mouvement (la vitesse est
supérieure à 0), si ce mouvement est décomposé (plusieurs cloches), si il y a une
correction, quel est le maximum de vitesse ? , … Puis, on peut se demander comment
évolue la vitesse. On effectue les mêmes opérations que pour la vitesse, est on établie la

dérivé. On sait alors à quel moment on accélère le mouvement et quand on le décélère.
On continue en étudiant l'accélération, … sa dérivé correspond à la secousse (jerk).
À chaque opération, on gagne plus :
• de détails et de précision sur l’évolution de la variable avec le temps.
• d’information sur le mouvement
• de niveaux de contrôle possibles
Typologie des mouvements
• Mouvement discret : avec un début et une fin identifiables
◦Mouvement balistique : très rapide (< 120 ms, sans arrêt ni correction
intermédiaires)
• Mouvement sériel : plusieurs mouvements mis bout à bout
• Mouvement continu : sans fin identifiable
Le mouvement continue présente un profil en cloche, c'est à dire qu'il n'y a pas de
correction. Il y a une accélération, puis une décélération.
Le mouvement discontinue quand à lui présente un profil avec plusieurs cloches, c'est
l’association de plusieurs mouvements continues.
Ex : lors de l'apprentissage d'un mouvement par l'enfant, on remarque qu'il exécute
plusieurs mouvement pour en faire un seul par le graphique de vitesse qui présente
plusieurs cloches. Avec l’apprentissage il « supprime » les correction, et
l'apprentissage rend prédictible (anticipation)
Modèles de contrôle
On a supposé un premier type de contrôle en boucle ouverte (proaction) :
Stimulus
Identification
du stimulus
Sélection de
la réponse
Programmation
de la réponse
Mouvement
Temps de réaction

• Contrôle anticipé : feedforward
• Programme (moteur)
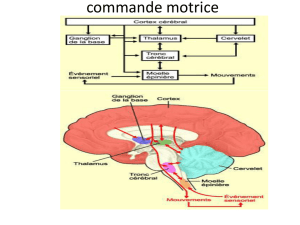
Puis un modèle plus adapté de type contrôle en boucle fermée (rétroaction) :
Caractéristique :
• Contrôle en retour : feedback
• référence sensorielle
Identification
du stimulus
Sélection de
la réponse
Programmation
de la réponse
Muscle
mouvement
Environnement
=
référence
Stimulus
mouvement
Sensation de
l'environnement
Sensation du
mouvement
Sensation du muscle
 6
7
8
9
10
11
12
13
14
15
16
17
18
6
7
8
9
10
11
12
13
14
15
16
17
18
1
/
18
100%

![9_expériencen°3BORDET_AVC [Mode de compatibilité] - FHP-SSR](http://s1.studylibfr.com/store/data/004836702_1-1abf3a10f6b16063102b68201f93c8b3-300x300.png)