Conception d`un module de gestion d`alimentation et de sa mise en

Conception d’un module
de gestion d’alimentation
et de sa mise en réseau
Note d’application
Par Isabelle BOUJAT et Matio PARENT
Tuteur Technique : Jaques LAFFON
Tuteur Industriel : Jean-Yves RIGNAULT
Client : COOPER Safety (Groupe EATON)
Jonathan BERNARD
Pierre-Emmanuel PRADELLE
Romain GAUDILLAT

Conception d’un module de gestion d’alimentation et de sa mise en réseau – Note d’application
BOUJAT Isabelle et PARENT Matio
2
Sommaire
Table des figures .................................................................................................................................... 2
1- Introduction ................................................................................................................................... 3
2 - Une tension de sortie variable ......................................................................................................... 4
3 – Les mesures ...................................................................................................................................... 5
3.1 – Mesure de tension ..................................................................................................................... 5
3.2 – Mesure de courant de sortie ..................................................................................................... 5
3.3 – Mesure de température ............................................................................................................ 5
4 - Le monitoring .................................................................................................................................... 5
4.1 Modification de la valeur de la résistance .................................................................................... 5
4.2 Conversion analogique numérique............................................................................................... 6
5 – La carte de régulation ....................................................................................................................... 7
Table des figures
Figure 1 : Schéma Alimentation ............................................................................................................. 4
Figure 2 : Variation de la tension en fonction du pas de résistance ....................................................... 4
Figure 3 : Potentiomètre Numérique ..................................................................................................... 4
Figure 4 : Mesure de tension .................................................................................................................. 5
Figure 5 : Mesure de courant ................................................................................................................. 5
Figure 6 : Mesure de température ......................................................................................................... 5

Conception d’un module de gestion d’alimentation et de sa mise en réseau – Note d’application
BOUJAT Isabelle et PARENT Matio
3
1- Introduction
Dans le cadre de nos études de 4ème et 5ème année de cycle ingénieur en Génie Electrique à
Polytech Clermont-Ferrand, nous avons travailler sur des problématiques d'entreprise afin de
compléter notre formation professionnelle.. En collaboration avec Cooper Safety, spécialiste dans les
dispositifs de sécurité anti-incendie, une nouvelle méthode permettant d'alimenter une charge grâce
à plusieurs alimentations est en cours de développement.
Actuellement chaque sirène fonctionne grâce à une alimentation unique. Le problème rencontré
est que si cette alimentation tombe en panne le jour d’un incendie ou que des opérations de
maintenance doivent être réalisées sur celle-ci, alors l'avertissement sonore n'est plus garanti. De
plus les alimentations ne débitent pas forcément une tension suffisante pour la charge sur laquelle
elles sont branchées.
Cooper Safety souhaite donc réaliser une mise en parallèle de 3 alimentations pour plus de
sécurité. Avec ce système si l’une des cartes (alimentation) tombe en panne, les deux autres
prendront le relais pour garantir le fonctionnement de la sirène, de plus la mise en parallèle des
alimentations permettra d’augmenter la puissance débitée sur la charge.
Cette note d’application va présenter les différentes solutions aux problématiques posées par la
mise en parallèle et pour finir, une brève explication de comment utiliser la carte.

Conception d’un module de gestion d’alimentation et de sa mise en réseau – Note d’application
BOUJAT Isabelle et PARENT Matio
4
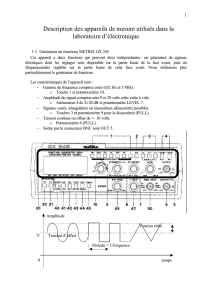
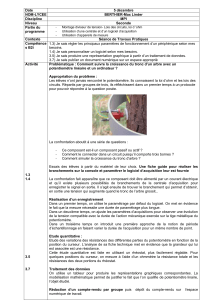
2 - Une tension de sortie variable
Actuellement les alimentations que nous avons a notre disposition on une tension de sortie
fixe (24 ou 48V). Afin d’avoir une tension de sortie variable (48 +/- 8V) nous allons modifier le schéma
initial de ce montage en remplaçant la résistance fixe entouré sur la figure 1 par un potentiomètre
numérique.
Figure 1 : Schéma Alimentation
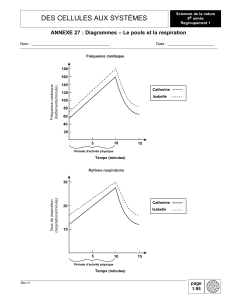
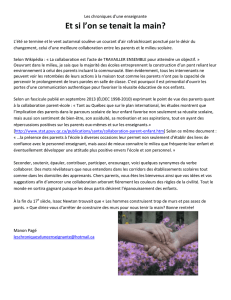
Le potentiomètre numérique choisi à une valeur maximum de 2,5KOhms et 256 pas de
variations. Ce qui nous donne un pas de résistance de 9.76Ohms. Grace à ceci nous pouvons faire
varier la tension de 40 à 56V avec un pas de tension de 0.49V. Comme on peut le voir sur la figure 2,
nous avons 64 pas utiles sur 256 pour la variation de tension voulue.
Figure 2 : Variation de la tension en fonction du pas de résistance
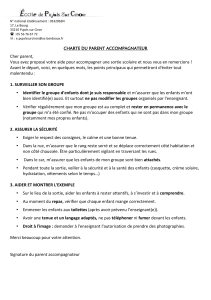
Le potentiomètre numérique choisis est celui présenté en
figure 3. Il fonctionne avec le protocole I2C. Nous utilisons les sorties
W1 et B1 pour la résistance.
35
40
45
50
55
60
141
138
135
132
129
126
123
120
117
114
111
108
105
102
99
96
93
90
87
84
81
78
Tension en Volts
Figure 3 : Potentiomètre Numérique

Conception d’un module de gestion d’alimentation et de sa mise en réseau – Note d’application
BOUJAT Isabelle et PARENT Matio
5
3 – Les mesures
Nous allons présenter ici les différentes solutions choisies pour effectuer les différentes mesures.
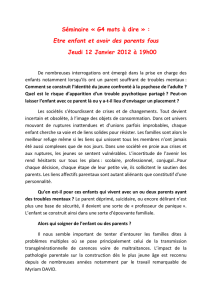
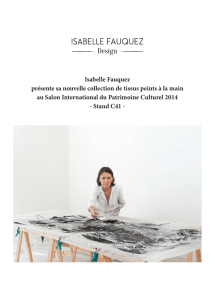
3.1 – Mesure de tension
Afin de mesurer la tension de sortie de chaque alimentation,
nous allons utiliser un pont diviseur de tension comme le montre la
figure 4. Les résistances R1 et R2 sont choisis de tel façon que la tension
envoyée sur la branche AN1 du microprocesseur sera inférieur a 5V. Une
diode zener est mise en parallèle a la résistance R2 afin de proteger le
PIC contre les surtensions.
3.2 – Mesure de courant de sortie
Le courant est mesuré grâce au composant MAX4080 présenté
en figure 5. Ce composant mesure la chute de tension aux bornes de la
resistance Rsense (0.5Ohms) et l’amplifie avec un gain de 5V/V.
Conaissant la tension et la résistance nous pouvons donc déterminer le
courant qui la traverse.
3.3 – Mesure de température
Nous avons choisi le composant présenté en figure 6. Celui-ci
fonctionne avec le protocole I2C et à une précision de 1°C.
4 - Le monitoring
Pour réaliser le monitoring de l’alimentation nous allons utiliser un PIC18F25K80. Nous allons
présenter ici les fonctions réalisées par le PIC.
4.1 Modification de la valeur de la résistance
La modification de la valeur de la résistance est réalisée via le protocole I2C en
fonction de la consigne donnée par l’utilisateur. Pour cela on modifie la valeur de la variable
« consigne » dans le programme et celui-ci calcul le nombre de pas de résistance nécessaire
avec la formule suivante : nb_pas = 19392000 /(2500 * (consigne - 1.25))
Le programme permettant de calculer le nombre de pas est le suivant :
Figure 4 : Mesure de tension
Figure 5 : Mesure de courant
Figure 6 : Mesure de température
 6
7
8
6
7
8
1
/
8
100%