en pdf

AUTOMATISMES
Jean-François MAZOIN
(Département Génie chimique-IUT Paul
Sabatier de Toulouse)

GC-AUL-C-01
page n°2
Sommaire
Sommaire ....................................................................................................................................... 2
Introduction.................................................................................................................................... 3
Chapitre 1 : Fonctions Logiques - Combinatoire............................................................................. 5
I. Variables Booléennes et Fonctions Logiques....................................................................... 8
I.1. Fonction Identité............................................................................................................... 8
I.2. Fonction Complément....................................................................................................... 9
I.3. Fonction ET...................................................................................................................... 9
I.4. Fonction OU..................................................................................................................... 9
I.5. Fonction NON ET (Nand)............................................................................................... 10
I.6. Fonction NON OU (Nor) ................................................................................................ 10
I.7. Fonction OU EXCLUSIF................................................................................................ 10
I.8. Fonction COINCIDENCE .............................................................................................. 11
II. Simplification des fonctions logiques................................................................................ 11
II.1. Postulats et théorèmes de l'algèbre de Boole. ................................................................. 12
II.2. Méthode de Karnaugh ................................................................................................... 12
II.3. Utilisation des combinaisons physiquement impossibles................................................ 14
Chapitre 2 : Fonctions Séquentielles Conditionnelles : Grafcet ..................................................... 16
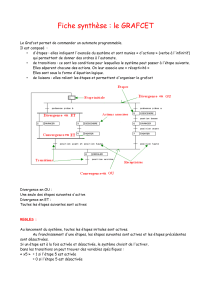
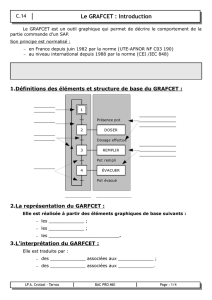
I. Description du Grafcet ...................................................................................................... 16
II. Exemple :.......................................................................................................................... 19
Chapitre 3 : L'Automate Programmable Industriel ........................................................................ 24
I. Structure des automates..................................................................................................... 24
II. Interfaces d'entrées et de sorties ........................................................................................ 25

page n°3
Introduction
On entend par automatismes tout ce qui met en œuvre des actions discontinues.
Appareillage procédé :
- Capteurs :
détection de seuils (LH)
détecteurs d'états (Flamme)
interrupteurs
- Actionneurs :
vannes Tout Ou Rien - TOR - (Ouverte ou Fermée)
moteurs - de pompe, d'agitation… - (Marche ou Arrêt)
lampes
Signaux :
Les signaux véhiculent une information discontinue, ils sont donc eux-mêmes discontinus. Ce
sont des signaux en tension du type "circuit sous tension" et "circuit hors tension". A l'inverse
de l'information sur une mesure, l'information sur un seuil ne requiert pas de précision, elle
exige simplement que l'on puisse différencier deux états. Les pertes de tension dans les lignes
entre le procédé et la salle technique ne constituent pas ici une perte d'information.
Ainsi, un message du type "seuil atteint" sera représenté par "circuit sous tension".
Loi de Commande :
Elle met en œuvre des fonctions logiques et ainsi est nettement plus simple à régler que la loi
de commande de la régulation continue.
Exemple : Si "seuil atteint" Alors "vanne TOR fermée".
Remarque : les automatismes portent également le nom d'automatique logique.
Technologies
Câblée : c'est l'ancienne technologie des automatismes, elle met en œuvre des contacts, des
relais, des bobines… Cette technologie est abandonnée au profit de technologies plus
modernes et plus souples. En effet, dans la technologie câblée, la loi de commande est figée
dans le câblage.
Programmée : elle fait appel à des outils d'informatique industrielle que l'on appelle les
automates programmables. Elle est de plus en plus systématiquement employée car grâce à
l'aspect de programmation de la loi de commande, celle-ci est très facilement adaptable aux
besoins et aux évolutions du processus.

page n°4
Applications :
Gestion des phases utilitaires d'un procédé comme le démarrage ou l'arrêt en décrivant et
automatisant l'ensemble des phases de ce démarrage ou de cet arrêt.
Elle se retrouvera également dans la gestion permanente des sécurités.
On voit que ces applications présentent une différence fondamentale : le temps. Le premier
cas est un procédé séquentiel. C'est à dire que la loi de commande doit intégrer le paramètre
temps, les actions sont gérées dans un ordre bien déterminé. Dans le deuxième cas, les
sécurités doivent être actives en permanence et leur apparition peut s'effectuer dans un ordre
indéterminé et à un instant indéterminé.
Il existe deux types de lois de commande :
Lois de commandes combinatoires
Lois de commande séquentielles
Lois de commandes combinatoires
Si = f ( ei )
Les sorties (actionneurs) sont une fonction logique des entrées (capteurs). On parle de loi de
commande combinatoire parce que les sorties résultent exclusivement de la combinaison des
entrées.
Lois de commandes séquentielles
Si = f ( ei , t ) ou Si = f ( t )
Les sorties (actionneurs) sont une fonction logique des entrées (capteurs) et du temps (degré
d'avancement de l'opération). On parle de séquentiel parce que la structure de la loi de
commande est définie par séquences. Cette chronologie devra être intégrée dans la loi de
commande.
Nous allons d'abord définir la logique combinatoire en utilisant le langage de programmation
"ladder" ou "à contact", héritage de l'automatique câblée. Nous verrons ensuite qu'il existe un
outil de programmation de logique séquentielle appelé le Grafcet. Grâce à cet outil, un
programme séquentiel peut être construit et la plupart du temps la programmation sur
automate sera effectuée sur Grafcet. Cependant, tous les automates n'intègrent pas le langage
Grafcet, nous verrons comment à partir de la structure Grafcet d'une application, mettre ce
programme en équations combinatoires.

page n°5
Chapitre 1 : Fonctions Logiques - Combinatoire
Exemple :
P max.
LSY
LSH
Le capteur LSH est un détecteur de seuil
pouvant délivrer un contact ouvert au repos
(normalement ouvert) ou un contact fermé
au repos (normalement fermé). L'organe de
correction est une vanne pneumatique
fonctionnant sur du 0 de pression (pression
atmosphérique) ou une pression maximale
en général comprise entre 4 et 10 bar
relatifs. La commande pneumatique est
admise dans le servomoteur de la vanne
procédé au moyen d'une électrovanne sur
le circuit pression appareil. Cette
électrovanne de commande fonctionne en
général en 24 V continu.
LSY est un automate programmable ou
simplement un pilote électronique, son rôle
est d'assurer la loi de commande.
Câblages :
 6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
1
/
26
100%