Présentation

Présentation
Session
2007
Attelle de mobilisation du genou : Kinetec Adventa +

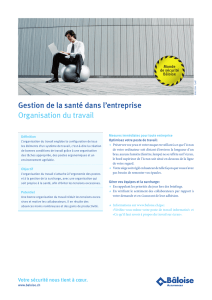
Présentation de la partie
opérative
Partie
opérative
Partie
commande
Patient à
rééduqué
Énergie
électrique
Programme
de
rééducation
Patient
rééduqué
Informations
visuelles

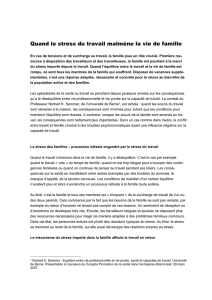
Description de la partie
opérative
Potentiomètre de
capteur d’angle.
Système roue et vis
sans fin permettant de
transformer un
mouvement de rotation
en mouvement de
translation.
Moteur à
courant
continu à
aiment
permanent.
Carte d’alimentation
permettant de
transformer la tension
du secteur en une
tension de +12V.
Connecteur DIN à
relier sur la Carte
100.

Présentation du cahier des
charges
Le produit doit assurer la posture du genou dans la plage angulaire de -5°à120°.
Le produit doit permettre de programmer son cycle de rééducation personnalisé.
Les paramètres de rééducation programmés doivent être visibles à tout
instant, ainsi que le fonctionnement en cours.
Sélection de cinq vitesses de fonctionnement, repérées de 1 à 5,
correspondant aux vitesses de déplacement.
Détection de surcharge entraînant l’arrêt de l’attelle puis l’inversion de son
sens de fonctionnement.
Le patient doit disposer d’une télécommande avec un accès à une touche
permettant l’arrêt ou la mise en fonctionnement de l’attelle.

Partie commande
Mauclaire Baptiste Pitet Jean-Noël Groupe 6
Groupe 5
 6
7
8
9
10
11
12
13
14
15
6
7
8
9
10
11
12
13
14
15
1
/
15
100%