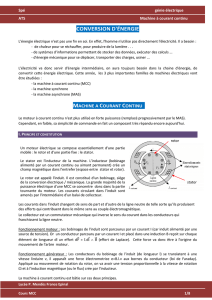
Inducteur

Electrotechnique:
Electricité Avion,
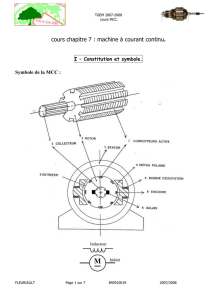
La machine à Courant Continu
Dr Franck Cazaurang, Maître de conférences,
Denis Michaud, Agrégé génie Electrique,
Institut de Maintenance Aéronautique
UFR de Physique, Université Bordeaux I

TSMCC
Composant :
Le Moteur à
courant continu

Sommaire: MCC
•Fonctionnel Mcc
•Fonctionnement Machine à Courant Continiu
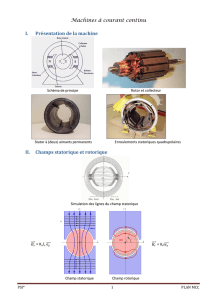
•Description interne
•Mécanique...
•Les relations
•L’excitation
•Bilan de puissance
•Caractéristiques
•Exemple de MCC
•Moteur / Génératrice
•Commande
•Commande par pont
•Photos: inducteur + MCC
•Rappel des caractéristiques électro-mécaniques
•Les modes d’excitation de la MCC
TS
MCC


 6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
1
/
64
100%