Les machines asynchrones

Les machines synchrones

12
sinC k H H
Zone utile

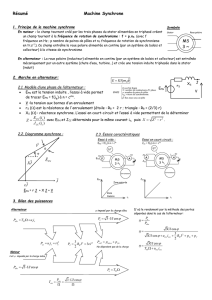
Principe
nC’est un convertisseur d’énergie mécanique en
énergie électrique (alternateur) ou inversement
(moteur synchrone) qui effectue une
transmission magnétique
nLe champ magnétique entrainant le rotor
équivalent à un aimant est créé par des
bobinages créant un champ magnétique tournant
dans l’entrefer à une vitesse
Sf
np
•Fréquence du réseau en Hz
•Nombre de paires de pôles
•Fréquence du champ tournant en tr/s

Symbole
MS
~
MS
3~
Induit
Inducteur
Machine
monophasée
Machine
Triphasée
MS
~
MS
3~
~
~
~
1
2
3
~
1
2
3

Constitution
nRotor
–À aimant permanent (Brushless: sans balai)
–A rotor bobiné:
nPôles lisses
nPôles saillants
nStator
Le stator est un bobinage polyphasé (en général branché en Y), qui
engendre un champ tournant.
Il est pourvu d’encoches dans lesquelles sont distribués les conducteurs
d’un bobinage triphasé
S
N
N
S
ie
N
S
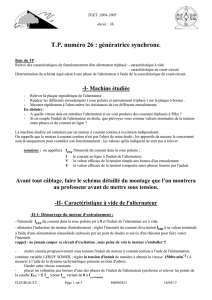
GS
3~
GS
3~
Alternateur
auxiliaire
Redresseur
Induit principal
(sur le stator)
Alternateur
principal°
Inducteur
ie
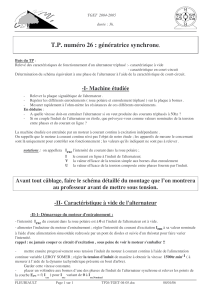
ROTOR
Aimants fixes (inducteur)
Induit
Fig. 1
 6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
1
/
28
100%