09_Resume_TGET_Machine_synchrone

Résumé Machine Synchrone
1. Principe de la machine synchrone
En moteur : le champ tournant créé par les trois phases du stator alimentées en triphasé créent
un champ tournant à la fréquence de rotation de synchronisme : f = p.nS (avec f
fréquence en Hz ; p nombre de paires de pôles et nS fréquence de rotation de synchronisme
en tr.s-1.). Ce champ entraîne la roue polaire alimentée en continu (par un système de balais et
collecteur) à la vitesse de synchronisme
En alternateur : La roue polaire (inducteur) alimentée en continu (par un système de balais et collecteur) est entraînée
mécaniquement par un autre système (chute d’eau, turbine…) et crée une tension induite triphasée dans le stator
(induit)
2. Marche en alternateur:
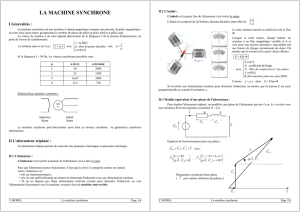
2.1. Modèle d’une phase de l’alternateur :
EPN est la tension induite , l’essai à vide permet
de tracer EPN = f(ie) à n = cste.
V :la tension aux bornes d’un enroulement
rS () est la résistance de l'enroulement (étoile : RB = 2 r ; triangle : RB = (2/3) r)
XS () : réactance synchrone. L’essai en court-circuit et l’essai à vide permettent de la déterminer
()
()
PN e
CC e
Ei
ZJi
avec EPN et JCC déterminés pour le même courant ie, puis
22
X Z r
.
2.2. Diagramme synchrone :
PN
E
V
J
Jr
JX
EPN = r J + X J + V
3. Bilan des puissances
D'où le rendement par la méthode des pertes
séparées dans le cas de l’alternateur:
MS
3 ~
Symbole
Roue polaire
Stator
:coef de Kapp
: nombre de conducteurs d'1 phase
: nombre de paire de pôles
: vitesse de synchronisme
ˆ: flux max sous un pôle
ˆ
avec
S
K
N
p
nS
E KNpn
EPN
rS
XS
J
V
MS
3 ~
Essai à vide :
EPN = f(ie) à n = cte
V
A
DC
AC
Entrainement
Essai en court circuit :
JCC = f(ie) à n = cte
DT
MS
3 ~
A
A
DC
AC
Entrainement
DT
EPN
EPN
ie
ie
Zone
linéaire
Zone saturée
ie
JCC
JCC
ie
2.3. Essais caractéristiques
2
3 cos
3
3 cos 2
3 cos
u
abs
exc exc B m f
M exc exc
P
P
UI
UI u i R I p p
UI
T u i
abs M e e
P T u i
2
je e e e
P u i ri
22
33
2
JB
P R I rJ
coll méca fer
P p p
3 cos
u
P UI
Alternateur
Moteur
3 cos
abs
P UI
uM
PT
imposé par la charge élec
3 cos
em
em PUI
T
Ne dépendent pas de la charge
et
imposés par la charge méca
1
/
1
100%