Main myoélectrique TouchBionics, la finesse au bout des

Main myoélectrique Touch Bionics,
la finesse au bout des doigts…
Par :
Josée Dubois,
prothésiste
Institut de Réadaptation Gingras-Lindsay-de-Montréal
AQIPA 2012

Résumé de la
présentation
Touch Bionics, c’est
qui, c’est quoi ?
Études de cas
Conclusion sur notre
démarche

Petite leçon d’anatomie…
La main comporte 27 os et
un nombres impressionnant
de muscles, tendons,
ligaments, vaisseaux
sanguins et nerfs.
Structure anatomique la
plus complexe du monde
animale.
Combine finesse, force,
dextérité et mobilité.
Combien de muscles sont
utilisés lorsque vous tournez
une clé dans une serrure??
60 muscles!

Touch Bionics, c’est qui, c’est quoi?
Cie écossaise qui a mise en marché
la main myoélectrique I-Limb en
2006.
Main de nouvelle génération d’une
fonctionnalité beaucoup plus
naturelle due aux 5 doigts motorisés
et aux jointures articulées sur
chaque doigt.
Main permettant 13 différentes
préhensions (choix de 4 prises) avec
force de préhension entre 22 et 30
lb/pression.
Création du produit dérivé appelé I-
Limb Digits.
Prothèse pour amputation
transmétacarpienne (1 à 5 doigts).

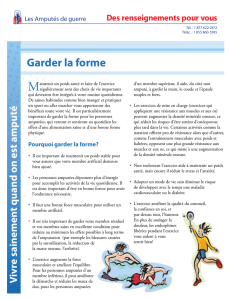
Types de préhensions main I-Limb
pointage
Prise sphérique
Prise latérale
Prise à 2 doigts
(pinch)
Prise à 3 doigts (tripod)
Prise cylindrique
Pleine main
Poignet à flexion
 6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
1
/
25
100%