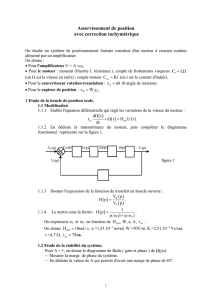
Etude theorique et experimentale de la libération d`énergie dans un

Régulation en position d’un
moteur à courant continu
Rubén Corral
Edmond Gheury
Jonathan Goldwasser
Vincent Vanderminnen

Plan de la présentation
•Introduction
•Filtres de garde
•Boucle de vitesse
•Boucles de position
•Génération de trajectoires
•Emballement du régulateur
•Problèmes rencontrés
•Conclusions et perspectives

Introduction
•Moteur à courant continu Maxxon
•Entrée :
–Consigne de courant
•Sorties :
–Vitesse
–Position fine
–Position approchée
•Perturbation :
–Frein
•Régulation interne en courant
•Travail autour d’un point de fonctionnement

Filtres de garde (1)
•Evitent le repliement spectral
•Dimensionnement :
–Constante de temps principale Tf>T0/2
–Tg = 0.5 * Tf : pas assez rapide
–Filtre dimensionné de manière plus stricte

0 0.2 0.4 0.6 0.8 1 1.2 1.4 1.6 1.8 2
0
0.2
0.4
0.6
0.8
1
1.2
1.4 Step Response
Time (sec)
Amplitude
Filtres de garde (2)
0 1 2 3 4 5 6 7
0
0.2
0.4
0.6
0.8
1
1.2
1.4 Step Response
Time (sec)
Amplitude
 6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
1
/
22
100%