Les NaN

@Pierre Marchand et Martin Dubois, 2002 59
IFT-17584
Semaine 03
Programmation système

@Pierre Marchand et Martin Dubois, 2002 60
Plan de la rencontre
•Retour sur la semaine précédente
•Types de données
•Rangement des données
• Modes d’adressage
•Gestion de la pile
•Variables locales
•Passage des arguments
•Interface avec les langages de haut niveau
•Récursivité, réentrance et translatabilité

@Pierre Marchand et Martin Dubois, 2002 61
La semaine précédente
•Compilateur
•Assembleur
• L’éditeur de liens
•« Listing files »
•Assembleur « inline »
•Déverminage
•Masm32
•Programme complètement en assembleur
•Programme mixte

@Pierre Marchand et Martin Dubois, 2002 62
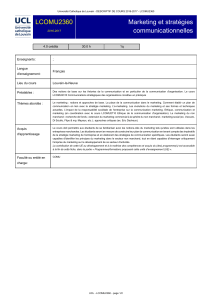
Types de données entières
Octet (byte)
Mot (word)
Mot double (doubleword)
BCD
BCD compacté (packed BCD)
Near Pointer
Far Pointer (Logical Address)
Champ de bits (bit field)
07
015
031
0313247
0347
0303
031
Field length

@Pierre Marchand et Martin Dubois, 2002 63
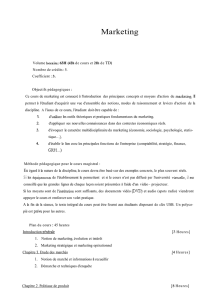
Types de données virgule flottante
Simple précision
Double précision
Précision étendue
Décimal compacté
31
63
79
79
823
11 52
15 64
0
0
0
0
 6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
1
/
68
100%