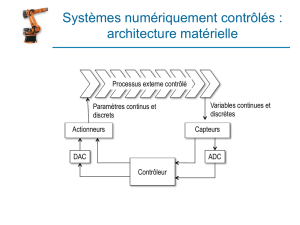
Une présentation du Bus SPI

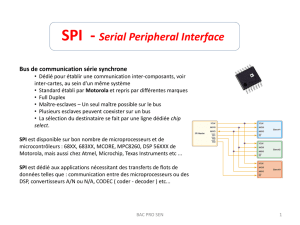
Bus de communication série synchrone
•Dédié pour établir une communication inter-composants, voir
inter-cartes, au sein d'un même système
•Standard établi par Motorola et repris par différentes marques
•Full Duplex
•Maître-esclaves –Un seul maître possible sur le bus
•Plusieurs esclaves peuvent coexister sur un bus
•La sélection du destinataire se fait par une ligne dédiée chip
select.
SPI est disponible sur bon nombre de microprocesseurs et de
microcontrôleurs : 68XX, 683XX, MCORE, MPC8260, DSP 56XXX de
Motorola, mais aussi chez Atmel, Microchip, Texas Instruments etc ...
SPI est dédié aux applications nécessitant des transferts de flots de
données telles que : communication entre des microprocesseurs ou des
DSP, convertisseurs A/N ou N/A, CODEC ( coder - decoder ) etc...
SPI - Serial Peripheral Interface
1Patrick Monassier - 2009

Le bus SPI contient 4 signaux logiques :
•SCLK —Horloge (généré par le maître)
•MOSI —Master Output, Slave Input (généré par le maître)
•MISO —Master Input, Slave Output (généré par l'esclave)
•SS —Slave Select, Actif à l'état bas (généré par le maître)
Il existe d'autres noms qui sont souvent utilisés :
•SCK —Horloge (généré par le maître)
•SDI,DI,SI —Serial Data IN
•SDO,DO,SO —Serial Data OUT
•nCS, CS, nSS, STE —SS
Dans le cas de la convention de nommage SDI/SDO, le SDO du maître
doit-être relié au SDI de l'esclave et vice-versa. Pour éviter les
confusions au moment du câblage, il est donc souvent recommandé
d'utiliser les dénominations MISO-MOSI qui évitent une certaine
ambiguïté.
Les signaux :
2Patrick Monassier - 2009

Le bus SPI est une liaison série synchrone qui opère en mode "full duplex" - émission /
réception simultanée
La méthode d'accès et du type maître / esclave et c'est toujours le maître qui a
l'initiative des échanges : quand le maître sélectionne l'esclave et génère l'horloge, les
données sont échangées dans les deux directions, simultanément.
Le maître ne tient pas compte de la donnée reçue dans le cas d'un échange "écriture
seule" ou alors il envoi un octet sans importance ( 0xFF ) dans le cas d'un échange
"lecture seule" ;
La communication avec un esclave de type CODEC par exemple (coder-decoder), permet
d'exploiter pleinement les capacités du bus SPI, avec un flot de données bidirectionnel.
Le maître génère l'horloge et sélectionne l'esclave avec qui il veut communiquer.
L'esclave répond aux requêtes du maître.
A chaque coup d'horloge le maître et l'esclave s'échangent un bit.
Après huit coups d'horloges le maître a transmis un octet à l'esclave et vice-versa.
La vitesse de l'horloge est réglée selon des caractéristiques propres aux périphériques.
Principes :
3Patrick Monassier - 2009

Il est possible de choisir le type d’horloge grâce à une combinaison de 2 bits dans le registre
SPCON : le bit noté CPOL (Clock POLarity) et le bit noté CPHA (Clock PHAse).
•CPOL détermine le niveau logique de la ligne SCK au repos.
•CPHA détermine le front sur lequel la donnée est modifiée et le front sur lequel la donnée
va être lue.
Les signaux :
Les modes 0 et 3 sont identiques en
transmission, seule change l'état de la
ligne d'horloge au repos .
C'est pour cette raison que de
nombreux périphériques peuvent être
capables de dialoguer soit en mode 0
et 3, soit en mode 1 et 2.
Mode CPOL CPHA
O0 0
10 1
21 0
31 1
Chronogramme des différentes configurations d'horloge
4Patrick Monassier - 2009

En mode maître, la vitesse de transmission est sélectionnée par 3 bits du registre SPCON (Serial
Peripheral CONtrol register): SPR2, SPR1 et SPR0.
La fréquence d’horloge est choisie parmi 7 fréquences obtenues par division de la fréquence de
fonctionnement du microcontrôleur.
SPR2 : SPR1 :
SPR2
Fréquence de
la SPI
000 Fμc/2
001 Fμc/4
010 Fμc/8
011 Fμc/16
100 Fμc/32
101 Fμc/64
110 Fμc/128
Pour le SPI il est possible de
trouver certains composants au
delà de 20 Mbits
5Patrick Monassier - 2009
La vitesse :
Le chaînage SPI :
Certains composants SPI sont conçus pour être chaînés,
simplifiant ainsi les connexions entre composants, en réduisant
le nombre de lignes SS nécessaires.
 6
7
8
6
7
8
1
/
8
100%