Technique d`asservissement de balance

1
Sujet:
Technique d’asservissement de balance:
Application à un fléau à suspensions flexibles
Tuteurs: P.PINOT
M.LECOLLINET
Réalisé par: N.N.HOANG

2
Le plan de l’explosé
•Étude d’un fléau à suspensions flexibles.
La sensibilité théorique d’une balance.
Fléau d’une balance classique.
Fléau à suspensions flexibles.
Pourquoi asservir un fléau?
•Techniques d’asservissement d’une balance.
Système de commande en boucle ouverte.
Système de commande en boucle fermée.
Présentation du capteur et de l’actionneur.
Algorithme du correcteur PID.
Réalisation d’un asservissement d’une balance.
•Techniques d’asservissement moderne.
Contrôleur flou.
Systèmes numériques de contrôle-commande.

3
l
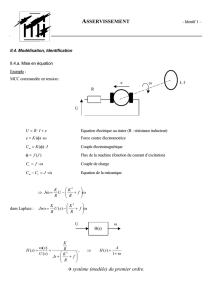
•Étude d’un fléau classique.
x
A
mg
x’
B
m’g
βγ
α
O
Sensibilité théorique d’une balance (S)
Fléau d’une balance classique
)(
lim
0m
Sm
1
1 2 3
d cos
d cos sin sin
la
Sm ml m'l wl
d cos
d 2 sin
l
Sm ml wd
On supposant que :
l1≈l2=l.
β=π-α
γ=π/2
OG=d >0
m=m’
•Glissement
•Usure des couteaux

4
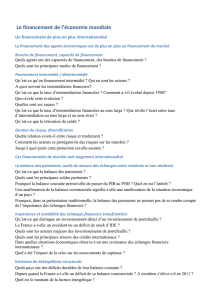
•Étude d’un fléau à suspensions flexibles.
Qu’est-ce qu’une suspensions flexibles?
Suspension flexible sur le comparateur du BIPM.
Sous une charge m,la raideur kd’une
telle lame flexible est donnée par la relation
suivante :
k=[mEI]1/2coth[l(m/EI)1/2]
Avec:
E: Module d’Young.
I: Moment quadratique de la lame.
l: Longueur de la lame.

5
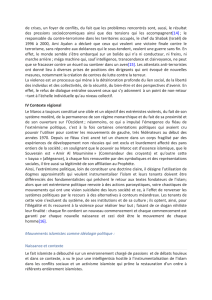
•Pourquoi asservir un fléau?
Indicateur (I)
Mg1
l1l2
ei i
Mg
Principe d’une comparaison simple de masses.
Si on connaît bien la position du centre de relation du fléau et des points
d’application sur le fléau des charges, on pourra donner l’équation des moments:
1 1 1 2 2 2 2 2
( ) [( ) ]
a ei a i i I
M V g l M V g l g l
S
Avantage d’un asservissement
1. Réduction de l’influence des défauts mécaniques (hystérésis, anélasticité, …).
2. Réduction de l’influence de l’opérateur.
3. Amélioration de la résolution
4. Amélioration de la répétabilité du processus de pesage
 6
7
8
9
10
11
6
7
8
9
10
11
1
/
11
100%