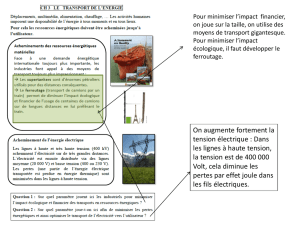
Chaîne d`information et chaîne d`énergie

Chaîne d’information et chaîne d’énergie
Pour certains systèmes simples ne comprenant pas de flux de matière, on peut faire une
description sous forme de chaîne d’énergie et chaîne d’information. Prenons le cas d’une
maquette de bateau radiocommandé.
On ne présente que les éléments utiles à la compréhension du système en terme d’échanges
d’énergie et d’informations. Par exemple rien sur l’esthétique, rien sur la structure de la coque,
rien sur l’alimentation électrique des cartes électroniques, …

Chaîne d’information et chaîne d’énergie (valeur ajoutée)
La chaîne d’information assure le fonctionnement correct du système (c’est le cerveau). La
chaîne d’énergie décrit les échanges et transformations d’énergie (ce sont les muscles) en vue
d’obtenir une valeur ajoutée.
Ici la valeur ajoutée sera la mise en rotation de l’hélice (permettant la propulsion du bateau)
et le positionnement du gouvernail (permettant l’orientation du bateau).

Chaîne d’information et chaîne d’énergie (descriptif)
Complétons le descriptif :
……….

Domaines physiques
Électronique
Électrotechnique
Mécanique
Mécanique des fluides
Chaîne d’information et chaîne d’énergie (multiphysique)
Cette représentation est dite multiphysique :

Chaîne d’information et chaîne d’énergie (flux)
Ici l’antenne reçoit un flux
d’information sous forme
d’ondes radio (émise par
la radiocommande qui
traduit les ordres de
l’utilisateur) mais n’en
émet pas.
Les flèches indiquent le sens des flux :
Ici les échanges entre
accumulateur et variateur
peuvent se faire dans les
deux sens.
Interpréter cette représentation comme un
service rendu ou demandé, ici la LED allumée
indique que la maquette est sous tension.
 6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
1
/
20
100%