Chapitre #1: Introduction

Physique mécanique (NYA)
Chapitre 1: Introduction

1.1 Qu’est-ce que la physique ?
Les trois domaines de la physique classique:
•Mécanique classique
•Thermodynamique
•Électromagnétisme
Les trois domaines de la physique moderne:
•La relativité restreinte
•La mécanique quantique
•La relativité générale
Les quatre interactions fondamentales:
• L’interraction gravitationnelle
• L’interraction électromagnétique
• L’interraction nucléaire forte
• L’interraction nucléaire faible

1.2 Notions, modèles et théories
•Une notion est une idée ou une grandeur physique dont on se sert pour analyser les
phénomènes physiques. Exemples: espace, longueur, temps, masse. accélération,
force, énergie, température et charge électrique.
•On peut définir une grandeur physique par la méthode employée pour la mesurer
(définitions opérationnelles).
•Une loi est une relation mathématique entre des grandeurs physiques (Ex. F = kx,
F = ma, Loi de la gravitation).
•Alors qu'une loi peut se limiter à un domaine restreint de la physique, un
principe est un énoncé très général sur le fonctionnement de la nature (Ex.
principe de conservation de l’énergie, principe de la relativité).
•Un modèle est une analogie ou une représentation pratique d'un système physique
(Ex. Le planétaire. La Terre et la Lune comme des objets ponctuels. La lumière
comme un écoulement de particules ou comme une onde).
•Une théorie part d'une combinaison de principes, d'un modèle et de
postulats pour tirer des conclusions particulières ou des lois (Ex. la théorie
de la gravitation). Une théorie physique doit faire des prévisions précises et
vérifiables.

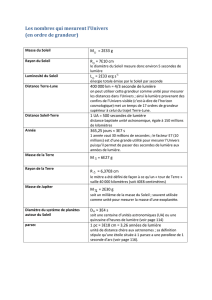
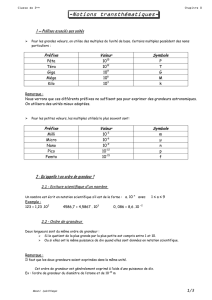
1.3 Les unités
• La valeur d'une grandeur physique s'exprime en fonction de l’unité de mesure
(m, s, kg, N) lequel est défini par un étalon de mesure. L’unité est le symbole
qui représente l’étalon. À chaque unité fondamentale doit correspondre un
étalon précis.
Définitions de chacun des étalons du système SI:
•L'unité SI de masse (1 kg) est définie comme étant la masse d'un cylindre en
platine iridié déposé au Bureau international des poids et mesures, à Sèvres, en
France.
•La seconde (1 s) est définie à partir d'une radiation émise par l'atome de
césium 133. Plus précisément, une seconde équivaut à 9 192 631 770
vibrations de cette radiation.
•Le mètre (1 m) fut défini à l'origine (au XVIII siècle) comme la dix
millionième partie de la distance entre l'équateur et le pôle Nord. Le mètre fut
à nouveau redéfini, cette fois-ci par la distance parcourue par la lumière en
1 /299 792 458 seconde dans le vide.

Exemples:
3
23
33
3
3
2
3
203 .1 3
1 1 10 1 10
1 1 10
11
1 1 10
1 1 10
NYA Ch E
g g cm kg kg m
cm m g
cm
m cm
g kg
5 12
1
85
811
203 .1 5
) 1 . . 3 10 365 24 60 60 9.46 10
3 10 3 10
1 3600
) 3 10 7.20
1,5 10 1
an
NYA Ch E
a al c t km s s km
c m s km s
m UA s
b c UA h
s m h
 6
7
8
9
10
11
6
7
8
9
10
11
1
/
11
100%