Régulateur de la force de traction d`une bande DC

bus CAN
f
BEA--212932-F-02
Régulateur de la force de traction
d'une bande DC 600.
Principe de fonctionnement
Instructions
de service
1. Sécurité 2
2. Remarques générales 2
3. Principe de fonctionnement 2
3.1 Vocation 2
3.2 Construction 4
3.3 Fonctionnement 5
3.3.1 Régulateur de type 0, actionneur frein 5
3.3.2 Régulateur de type 1, actionneur entraînement électrique 6
3.3.3 Calcul du diamètre de la roule avec le régulateur de
type 0 et le régulateur de type 1 7
3.3.4 Régulateur de type 2, actionneur engrenage à rapport
variable de transmission 8
5. Télécommande DO 6000 9
4. Mise en réseau de régulateurs de la force de traction 9
6. Caractéristiques Techniques 9
7. Glossar 11

2
Régulateur de la force de traction d'une bande DC 600.
1. Sécurité
1.1 Désignation des symboles
précède tout alinéa dont le contenu devra être particulière-
ment observé afin de préserver la fiabilité du fonctionnement
du régulateur de la force de traction d'une bande DC 6000 ou
DC 6001.
Le régulateur doit être exclusivement utilisé pour réguler la force de
traction d'une bande.
Le régulateur de la force de traction a été construit selon les concep-
tions les plus modernes.
Utilisez le régulateur de la force de traction uniquement:
- en parfait état technique,
- conformément à sa vocation, dans le respect des Instructions de
Service.
Toute intervention portant sur le fonctionnement, l'adaptation de la
production, le changement ou le réglage du régulateur de la force de
traction de même que toute intervention pour l'inspection, l'entretien
et la réparation sera obligatoirement effectuée par un personnel
dûment qualifié.
Conservez avec soin la présente documentation en la gardant en
permanence à la disposition du personnel.
Avant la mise en oeuvre du régulateur DC 600., il est nécessaire
d'ajuster et d'optimiser dans les règles de l'art les composants de
l'installation et appareils mis à disposition par le client et qui seront
reliés au régulateur.
Il peut s'agir par exemple:
- d'entraînements à modulation de vitesse, de freins pneumatiques
et électriques
- de régulateurs de vitesse
- de changeurs de fréquence
Si ces conditions préliminaires ne sont pas remplies, le
fonctionnement impeccable du régulateur de la force de
traction DC 600.. ne pourra pas être assuré.
Le régulateur numérique de la force de traction d'une bande DC 600.
régule la force F d'une bande en défilement. A partir d'une consigne
donnée et de la valeur réelle mesurée de la force de traction, il déter-
mine la valeur de l'action nécessaire pour maintenir la consigne, soit
F-réelle = F-consigne.
Le régulateur de la force de traction DC 600. se comporte comme
un régulateur à action P-, PI-, ou PID (proportionnelle, intégrale,
dérivée). Voir figure en haut de la page 3.
Le régulateur de la force de traction peut commander divers ac-
tionneurs. Il peut être employé sur des dispositifs d'enroulement, de
déroulement ou entre des unités de transport. Le régulateur de la
force de traction est livrable en trois types différents:
1.2 Utilisation conforme à la
vocation de l'appareil
1.3 Instructions de service
2. Remarques
générales
2.1 Ajustage des composants
de l'installation mis à dis-
position par le client
3. Principe de
fonctionnement
3.1 Vocation

3
Régulateur de la force de traction d'une bande DC 600.
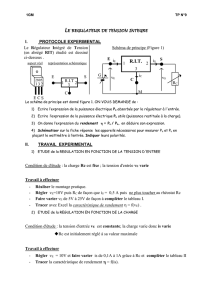
régulateur PID
TnTvTn
Principe de régulation PID
PD..
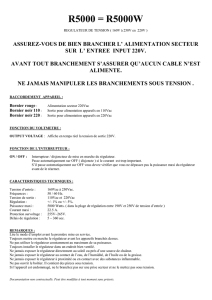
Régulateur de type 0
Régulation de la force de traction sur un
dérouleur avec freins
D-Anteil
action I
action P
action P
action I
action D
Le type 0 est employé pour la régulation de la force de traction avec
un frein électrique ou pneumatique comme actionneur. Le régulateur
de type 0 est employé sur des dispositifs de déroulement.
PDPDPD
Régulateur de type 1
Régulation de la force de traction de la
bande avec des entraînements
électriques
Le type 1 est employé pour une régulation résultante de la force de
traction (régulation en cascade) avec des entraînements électriques
à vitesse modulée ou un engrenage différentiel (tel un Harmo-
nicdrive) comme actionneur. On emploie des engrenages à 1 et 4
quadrants. La force de traction de la bande est ainsi régulée entre
l'entraînement enrouleur et l'entraînement principal ou entre
l'entraînement principal et l'entraînement de transport.

4
Régulateur de la force de traction d'une bande DC 600.
PD
3.2 Construction
Régulateur de type 2
Régulation de la force de traction d’une
bande via l’entraînement électrique d’un
actionneur à rapport variable de
transmission
Le régulateur de la force de traction d'une bande DC 6000 est placé
dans un tiroir de 19" enfichable dans un châssis. Il comprend:
- la carte de régulation RK 4101 (processeur avec régulateur PID et
amplificateur de F-réelle)
- la carte de logique LK 4101 (carte numérique entrées/sorties;
interface E/S)
- l'unité de commande RT 4101
Le régulateur de la force de traction d'une bande DC 6001 est placé
dans un boîtier pour le montage en réseau. Il comprend:
- la carte de régulation RK 4101 (processeur avec régulateur PID
et amplificateur de F-réelle)
- la carte de logique LK 4002 (carte numérique entrées/sorties;
interface E/S)
- l'unité de commande RT 4101
Régulateur DC 6001
Régulateur DC 6000
Le type 2 convient pour une régulation de la force de traction sur
une machine dotée d'un arbre mécanique (arbre de renvoi) et d'un
engrenage à rapport variable de transmission (tel un engrenage à
action PI). La force de traction de la bande est ainsi régulée via
l'entraînement électrique de l'actionneur. On emploie pour cela un
régulateur à trois niveaux d'action.

5
Régulateur de la force de traction d'une bande DC 600.
Le principe de fonctionnement du régulateur de la force de traction
d'une bande DC 600. dépend de l'actionneur et du type de régulateur
employé. On distingue entre:
-Régulateur de type 0
régulation de la force de traction de la bande par actionneur "frein"
-Régulateur de type 1
régulation de la force de traction de la bande par actionneur
"entraînement électrique"
-Régulateur de type 2
régulation de la force de traction de la bande par actionneur
"engrenage à rapport variable de transmission"
Deux capteurs de force mesurent la valeur réelle de la force de trac-
tion d'une bande en défilement. Cette mesure est ensuite comparée
à la consigne et transmise sous forme d'un différentiel au régulateur
PID. Ce dernier délivre le signal d'action au convertisseur en aval U/P
(freins pneumatiques) ou E/I (freins électriques).
Les convertisseurs délivrent à la sortie un signal proportionnel à celui
de l'entrée pour actionner un frein pneumatique ou électrique.
Moment d'inertie
Pour compenser le moment d'inertie dans le cas d'un arrêt brutal, on
conseille de déterminer le diamètre de la roule.
Rotation des étriers de frein
On atteint une usure régulière des garnitures de frein en alternant les
étriers. Il y a une rotation après chaque arrêt de l'enclenchement du
régulateur.
3.3 Fonctionnement
3.3.1 Régulateur de type 0,
actionneur "frein"
compensation
de l'inertie
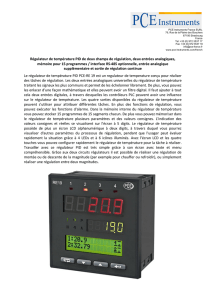
régulateur PID
n vannes
n vannes
D-réelle
F-réelle
∆FM
stop
facultatif
V-bande
N-roule
D réel
entraînement principal
F-cinsigne
Exemple:
Principe de fonctionnement d’une
régulation de la force de traction
d’une bande sur un dérouleur à frein
 6
7
8
9
10
11
12
13
14
6
7
8
9
10
11
12
13
14
1
/
14
100%