Méthodes nouvelles et simples de détection des unités atypiques

Gestion des sinistres graves
Plan
Approche globale (écrêtage sur l’ensemble du portefeuille)
Méthodes de détection : algébriques, graphiques,
probabilistes
Théorie des valeurs extrêmes
Approche locale
Dans les classes de risque (ou cases tarifaires) à
partir de la prime pure

Approches globales (1)
Rappels sur les méthodes
Approches déterministes
Méthodes algébriques
Méthodes graphiques
Approches probabilistes
La loi de probabilité
Théorie des valeurs extrêmes
Méthodes Bayesiennes

Approches globales (2)
Méthodes algébriques
Soit X la variable aléatoire du montant des sinistres.
La distance relative d’une unité au centre de la distribution X, Tsay
(1983), Hadi (1994).
Si m(moyenne, médiane,...) désigne un paramètre de tendance
centrale et s (variance, Median Absolute Deviation, intervalle
interquartile,...) un paramètre de dispersion, la distance relative
d’une unité au centre est définie par :
)( j
j
i
ixmedianxmedianMAD
s
mx
di
i

Approches globales (3)
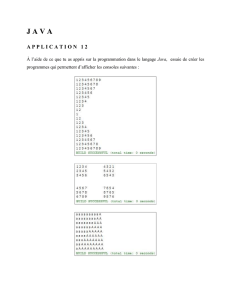
Méthodes graphiques
Graphique Boxplot (Grubbs, 1969, Goldberg, Iglewicz, 1992 , Gnanadesikan, 1997).
Le graphique Boxplot présente l’avantage d’être simple et facilement
compréhensible.
Pour Tukey (1975, 1977) les outliers se trouvent comme étant,
où - limite inférieure
et - limite supérieure.
Les paramètres peuvent être déterminés empiriquement ou à partir de la
connaissance de la fonction de répartition de Xet d’un seuil fixé dépendant du
nombre d’observations dans l’échantillon.
Pour une distribution asymétrique, comme le montant des sinistres - définir à droite
deux bornes en changeant le seuil, Davis, Gather (1993), Iglewicz, Banerjee
(2001) Zani, Riani, Corbellini (1998). On a une borne inférieure en dessous de
laquelle aucune unité n’est pas atypique, une borne supérieure au-dessus de
laquelle toutes les unités sont atypiques et entre les deux, la question reste posée.
LUxLFxXx ou/
)( 131 QQkQLF l
)( 133 QQkQLU u
ul kk et

Approches globales (4)
Méthodes graphiques
0
10000
20000
c
o
u
t
v1 v2 v3 v4
av
 6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
1
/
32
100%