Amplificateur non inverseur et limites de l`ALI

1
Étude d’un amplificateur non inverseur
Limites de l’ALI
I. Amplificateur linéaire intégré
1. Présentation
L’amplificateur linéaire intégré (ALI) est un circuit intégré formé d’un réseau de
transistors, résistances et condensateurs connectés sur une petite surface (puce), de l’ordre
du cm2.
Il s’appelle aussi amplificateur opérationnel, ou « ampli-op » (et il est alors noté AO) car
il a été développé dans les années 60 dans le but de réaliser des opérations mathématiques.
Aujourd’hui les domaines d’applications des ALI sont étendus à tous les domaines de
l’électronique.
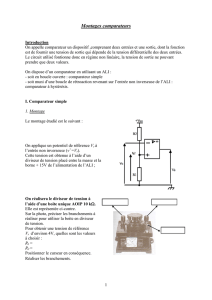
Extérieurement il se présente comme une puce à 8 pattes, dont seules 5 nous
intéressent :
E+ : borne d’entrée de l’ALI dite « non inverseuse »
E- : borne d’entrée de l’ALI dite « inverseuse »
S : borne de sortie de l’ALI
Ces trois bornes sont toujours représentées
+Vcc ,-Vcc : tensions d’alimentation symétriques
en général +15V et –15V
Rem :
- la connexion de masse est extérieure à l’ALI ; elle représente le point de référence
0 V, point commun aux deux alimentations +Vcc et -Vcc .
- les deux alimentations symétriques VCC ne sont jamais représentées sur les
schémas, mais elles existent toujours ; elles permettent de polariser
convenablement tous les composants actifs contenus dans le boîtier de l’ALI.
Ces deux alimentations sont celles qu’il faut allumer en premier et éteindre
en dernier.
Il y a deux symboles possibles:

2
2. L’ALI est un amplificateur de différence
Il amplifie en sortie la différence de tension appliquée entre les entrées non inverseuse et
inverseuse ,soit en sortie ouverte(schéma ci-dessus) :
vs = (e+ - e -) =
est appelé gain différentiel en boucle ouverte .
Pour un ALI idéal, ce gain est supposé infini.
3. L’ALI réel
a) . L’ALI réel présente des différences avec l’ALI idéal.
Ces différences, appelées « défauts », se font plus ou moins sentir selon les montages
considérés. La différence essentielle entre un ALI réel et l’ALI parfait vient de la dépendance
du gain de l’ALI par rapport à la fréquence.Cette dépendance est correctement modélisée par
une fonction de transfert de type passe-bas du premier ordre :
avec µ0 = gain différentiel en régime continu ( 105)
fAO = fréquence de coupure de l’ALI ( 10Hz) ; fAO =(2)-1.
Le but essentiel de ce TP est de constater que l’amplification différentielle de l’ALI dépend
de la fréquence.
b). Autres défauts.
i) Les courants d’entrée sont non nuls. Sensiblement constants, ils restent très faibles
(du nA au μA) mais empêchent le bon fonctionnement du montage intégrateur théorique (cet
effet pourra être étudié dans le TP « Montages Dérivateur et Intégrateur »).
ii) Il existe une tension de décalage en entrée, elle se manifeste par une tension de
sortie saturée alors que les entrées de l’A.O sont toutes deux reliées à la masse, et par
l’existence d’une tension continue de décalage en sortie dans les montages à A.O. Deux
broches sont prévues pour compenser cette tension à l’aide d’un potentiomètre (réglage
d’offset). Mais le bouclage rétroactif réalisé permet de ne pas tenir compte de ce défaut .
iii) L’A.O présente une résistance de sortie faible Rs ≈ qques Ω, elle est négligeable
devant les résistances de charge usuelles.
A ces défauts dits « linéaires » s’ajoutent des défauts non linéaires :
i) Le courant de sortie est limité : + I-sat ≤ is ≤ I +sat , courants de l’ordre de 25 A. Il
faut donc que le circuit de charge présente une résistance d’entrée suffisante pour que
l’A.O fonctionne convenablement.
ii) L’AO ne peut suivre des phénomènes trop rapides .Il est caractérisé par une vitesse
maximale de croissance de la tension ,appelé “slew-rate” ,de l’ordre de 1V/s.
Rappelons que pour fonctionner en régime linéaire, la sortie de l’AO doit être comprise entre
sat
V
et
sat
V
, avec
V13
sat
V
.
AOf
f
j
µ
j
µ
µ
1
1
00

3
II. Caractère passe -bas de l’ALI vu sur le montage amplificateur non inverseur.
1. Montage.
Réaliser le montage amplificateur non inverseur ci-
contre.
On prendra
11Rk
.
Pour
2
R
on choisira trois valeurs différentes , par
exemple:
R2=20kW
R2=10kW
25Rk
Ces valeurs sont données à titre indicatif ; respecter
les ordres de grandeur.
On se place en régime sinusoïdal.
Visualiser à l’oscilloscope le signal sinusoïdal délivré par le GBF ainsi que le signal de
sortie de l’ALI. Contrôler à l’oscilloscope que la tension de sortie n’est pas saturée ni
déformée. On modifiera la tension d’entrée s’il y a saturation ou triangularisation en sortie
(l’ALI doit fonctionner en régime linéaire ; utiliser éventuellement l’atténuation –20dB
du GBF).
2. Mesures.
On souhaite tracer sur une même feuille de papier semi-logarithmique ou sur un tableur
les trois courbes de gain correspondant aux trois valeurs de R2 choisies.
Choisir rapidement les gammes de fréquences nécessaires pour le tracé.
Faire des mesures du gain du montage en effectuant des mesures de valeurs maximales de
tension d’entrée et de sortie à l’oscilloscope (utilisé en mode AC pour ne pas prendre en
compte une éventuelle tension de décalage en sortie) ; on pourra aussi utiliser le voltmètre
en décibelmètre.
Tracer sur la même feuille de papier semi-logarithmique le diagramme de Bode du gain
du montage étudié, pour les trois valeurs de R2.
3. Exploitation.
On cherche à vérifier si le système se comporte comme un premier ordre fondamental, du
type
0
( ) 1
S
E
VG
Hj Vj
Tracer les diagrammes asymptotiques des courbes obtenues ; mesurer les pentes des
asymptotes. En déduire une première mesure de la fréquence de coupure des filtres
obtenus, en explicitant la méthode. Déduire également de l’exploitation des courbes les
valeurs du gain statique G0.
Comparer avec le résultat théorique attendu.
On montre que dans ce montage le produit gain statique bande passante est une
constante :
00C AO
G f f
, caractéristique de l’AO. Déduire de votre étude la valeur de ce
produit dans les trois cas étudiés.

4
Effectuer, à l’oscilloscope, la mesure de la fréquence de coupure pour les trois valeurs de
R2 choisies et comparer ces valeurs aux valeurs obtenues précédemment.
III. Étude des autres défauts.
1. Saturation de la tension de sortie.
Sur le montage amplificateur non inverseur étudié, en augmentant l’amplitude de la
tension délivrée par le GBF, observer pour différents signaux (en forme et en fréquence)
et pour différents gains la valeur maximale de la tension de sortie.Commenter.
2. Saturation du courant de sortie.
Sur le même montage, placer une résistance de charge RC(boîte AOIP100) entre la sortie
et la masse , en série avec un multimètre utilisé en ampèremètre. En régime sinusoïdal
1000Hz avec RC = 1000,régler la tension de sortie à quelques volts .Diminuer
progressivement RC et observer la tension de sortie .Vérifier qu’il existe un courant
maximal débité par l’amplificateur et évaluer sa valeur.
3. Vitesse de balayage ou slew-rate.
Toujours sur le même montage , avec RC ,envoyer
un signal sinusoïdal d’amplitude aussi grande
que possible mais sans saturation . Augmenter
la fréquence et constater à partir d’une certaine
fréquence la triangularisation du signal de
sortie.
Evaluer en V.s-1 les valeurs des pentes + et -.
1
/
4
100%