Les sons et les décibels - sur le site de Claude Lahache

Un son est une perturbation d'un milieu élastique (air, eau, métal …) :
Il se traduit par le déplacement des particules de ce milieu, ce qui a pour conséquence une variation locale de
pression.
Cet état de compression/dilatation se transmet de proche en proche, sans qu'il y ait transport de la matière ;
c'est pourquoi le son ne peut pas se produire dans le vide.
Tant que les ondes sonores n'atteignent pas l'oreille humaine ou celle d'un récepteur (animal, micro), le son ne
peut pas être entendu.
La vitesse du son dépend de la température et du milieu matériel où l'onde sonore se propage ; à la
température de 0°C elle vaut 332 m/s dans l’air sec ; à une température θ (en°C) s’écartant peu de 0, on peut
donner une loi approchée de la variation de la vitesse du son : c ≈ 332 + 0,6×θ
Le son est 4 fois plus rapide dans l’eau et 15 fois plus rapide dans l’acier. (De façon générale, la vitesse du son
augmente avec la masse volumique du milieu de propagation
)
Matériau Masse volumique Célérité
ρ (kg/m
3
) c(m/s)
Air à 0°C 1,293 331
Air à 20°C 1,20 344
Alcool éthylique 790 1207
Eau pure 998 1498
Aluminium 2700 5000
Fer 7900 5120
Ces vibrations des molécules peuvent être provoquées de différentes manières :
La membrane du Haut-Parleur vibre et provoque des ébranlements d'air périodiques qui produisent le son.
Les oscillations des cordes des Violon, Piano, Harpe, Guitare… (grâce aux doigts ou à l'archet) provoquent
des vibrations de la caisse de l’instrument ; celle ci entre en résonance, pour certaines fréquences, qui se
propagent ensuite dans l'air.
L’appareil phonatoire humain émet des sons "sonores" ou "voisés" par interruption quasi-périodique d'un jet
d'air
Caractéristiques physiologiques des sons :
Un son est caractérisé par son niveau (ou puissance ou intensité), sa hauteur ( ou fréquence) et son timbre (
lié à sa composition en harmoniques).

L’Oreille Humaine :

Pression Acoustique
La pression acoustique est la valeur efficace de la perturbation de la pression atmosphérique ; en moyenne, la
pression atmosphérique vaut 1000hPa ;
L'oreille est sensible à des variations de pression s’étendant de 2×10
-5
Pa à 20 Pa. (1pascal = 1newton/m
2
)
On voit donc que la dynamique de l’oreille est énorme, et, d’autre part qu’un son audible représente une
infime perturbation de la pression atmosphérique !
Pour ramener cette large échelle de pression à une gamme plus réduite, on adopte une échelle logarithmique
:
Le niveau de pression acoustique, en dB, s’écrit alors : N
dB
= 20log( P/P
o
)
avec P
o
= 2×
××
×10
-5
Pa
(on parle également de décibels acoustiques : dB
SL
, SL pour Sound Level)
Avec 2×10
-5
Pa ≤ P ≤ 20 Pa, il vient 0 dB ≤ N
dB
≤ 120dB
Le son le plus faible que l’oreille puisse entendre (seuil d'audition) à 1 kHz correspond à 0dB, alors que le
seuil de douleur (dommages plus ou moins réversibles de l’oreille) correspond à une pression de 20 Pa ( soit
120dB). La dynamique de l’oreille est ainsi de 120dB.
Un tympan « moyen » est irréversiblement lésé avec une pression acoustique de 200Pa, soit un niveau de
140 dB. (Niveau obtenu au voisinage d’un avion au décollage !)
Une variation de 3 dB est à peine sensible pour une oreille non exercée. C’est une raison pour laquelle on a
choisi le critère –3dB pour la définition de la bande passante d’un système électronique ou électroacoustique
(filtre, ampli, haut-parleur …).
Intensité Sonore
L’intensité d’un son (en un point, et dans une direction ∆ donnée) correspond à la puissance sonore par mètre
carré passant en ce point.
Soit une source sonore S, émettant de façon isotrope dans l’espace environnant
;
Si
est la puissance émise par la source, cette puissance se répartit sur la
surface d’une sphère de rayon r .
En un point M, à une distance r de S, et dans la direction (∆), la puissance reçue
par m
2
est
=
/(4πr
2
) .
On assimile
à l’intensité sonore en M :
I =
/(4πr2)
Relation avec la pression acoustique :
Si c désigne la vitesse du son dans le milieu de propagation et ρ la masse volumique de ce milieu, l’intensité
sonore I en un point est liée à la pression acoustique P par la relation :
c
P
I
2
=
Dans l’air, la pression acoustique de référence est Po = 2×10
-5
N/m
2
; à 0°C, ρ ≈ 1,3kg/m
3
et c ≈ 330m/s ; on
peut calculer une intensité acoustique de référence : Io ≈ 0,93×10
-12
W/m
2
; on adopte Io = 1×10
-12
W/m
2
.
La quantité Z
C
= ρc se nomme impédance acoustique caractéristique du milieu ; pour l’air à 0°C, nous avons
Z
C
≈ 430 uSI.
Le niveau sonore, que nous avons défini à partir de la pression acoustique P, peut également s’exprimer à
partir de l’intensité sonore :
oo
dB
II
log
P
P
logN ×=×= 1020
La référence 0dB (ou seuil inférieur d’audibilité) correspond à Po = 2×10
-5
Pa ou Io = 10
-12
W/m
2
Le seuil de la douleur (120dB) correspond à une pression de 20Pa, ou une intensité sonore de 1W/m
2
.
S M
(
∆
∆∆
∆
)

Voici quelques exemples de niveaux sonores en dB, et les pressions acoustiques correspondantes ;
Noter les expositions hebdomadaires tolérées (sans conséquences pour l’acuité auditive future !!)
On peut remarquer que le 0dB est une notion très théorique ; une oreille « moyenne » ne perçoit plus rien en
deçà de 15 à 20dB
.
Localisation spatiale des sources sonores
L’homme peut localiser la position d’une source sonore, dans un plan horizontal, grâce à son audition
biauriculaire. Issues d’une même source, des ondes sonores parviennent aux 2 oreilles avec une différence de
temps et d’intensité
.
Assimilons la tête à une sphère de diamètre D ; pour une onde
arrivant dans une direction faisant un angle θ par rapport à la
vue avant, il existe une différence de temps ∆t entre la
perception de chaque oreille : ∆t = ∆x / c (c : célérité)
La distance ∆x s’exprime par ∆x = D×sinθ
en conséquence, et pour la direction θ, ∆t = D×sinθ / c
Avec D = 16cm et c = 340m/s, il vient, pour θ = 30°,
∆t ≈ 0,24ms
Cette différence de temps permet de localiser une source, pour
des fréquences comprises entre 300 et 1200Hz environ.
On peut constater également une différence d’intensité au niveau de chaque oreille ; elle provient, d’une part,
de l’orientation différente des 2 pavillons par rapport à la direction incidente, et d’autre part, par l’éventuel
effet d’écran que peut produire la tête sur une des 2 ondes. Cet effet n’est toutefois sensible que pour des
fréquences sonores supérieures à 1000Hz.
Cette propriété physiologique a donné naissance à la diffusion sonore stéréophonique, qui est un procédé
électronique destiné à reconstituer la distribution spatiale des sources sonores
.
θ
θθ
θ
θ
θθ
θ
∆
∆∆
∆
x

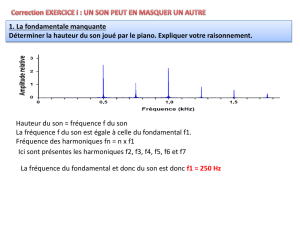
Hauteur :
L'être humain peut entendre les sons d'une fréquence comprise entre 20 Hz et 20kHz.
Entre 20 et 150Hz environ, on parle de sonorités graves ; au dessus de 500Hz, on les qualifie d’aiguës ; entre
les 2 se situe le domaine des médiums.
En deçà de 20Hz, se trouvent les infrasons, inaudibles, mais perceptibles par les viscères.
Au delà de 20kHz, se trouvent les ultrasons.
Les chiens peuvent entendre les sons jusqu'à 40kHz : on trouve des sifflets à ultrasons, souvent utilisés pour la
chasse ou le dressage. Les chauves-souris peuvent entendre jusqu'à 130kHz …
Comme le montrent les courbes d’égale sensation sonore (isosonie) de Fletcher, l’impression d’intensité
dépend beaucoup de la fréquence du signal écouté :
L’oreille est capable de percevoir un son de 0dB à 4 kHz, alors qu’à 100 Hz, le seuil d’audition monte à 40
dB ; cela explique que l’agent de police utilise un sifflet plutôt qu’un cor des Alpes … (en dehors des
questions d’encombrement !)
Cela explique aussi qu’un triangle ou un piccolo se distinguent aisément dans un orchestre symphonique
La prédominance des médiums permet d'être plus sensible à la parole, notre principal moyen d'expression
.
Un bruit est d’autant plus gênant qu’il se trouve dans la
zone de sensibilité maximale de l’oreille.
Les sonomètres (appareils utilisés pour mesurer le niveau
de bruit ambiant par exemple) sont donc équipés de filtres
assurant une pondération, nommée A, qui reconstitue la
courbe inverse de la sensibilité de perception.
La mesure est alors exprimée en dB(A).
Cette pondération est utile pour mesurer les bruits gênants.
Pour toutes les autres mesures de niveau, une mesure
linéaire est préférable.
 6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
1
/
20
100%