DUT GEII - DUT 2 ALTERNANCE

DUT GEII - DUT 2 ALTERNANCE
TRAVAUX PRATIQUES D’ÉLECTRONIQUE
SYSTÈMES DU SECOND ORDRE
Lundi 18 Mars 2013
A l’issue de ce TP, les points suivants doivent être maîtrisés :
– Systèmes du second ordre
– Identification d’un système du second ordre
– Grandeurs caractéristiques
– Boucle ouverte
– Intérêt de la boucle fermée
– Intérêt du Correcteur Proportionnel
– Différences entre systèmes du premier ordre et systèmes du second ordre
Pré-requis :
– Aspects temporels et fréquentiels des circuits RLC
– Diagrammes de Bode
– Formalisme de Laplace
– Systèmes du premier ordre
1 Partie théorique
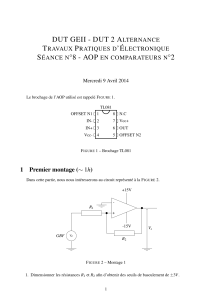
Nous allons nous intéresser dans cette partie au circuit RLC série représenté à la FIGURE 1 :
R L
C
ve(t)vs(t)
FIGURE 1 – Circuit étudié
1. A partir de la loi des mailles, donner la relation liant la tension de sortie (vs(t)) et la tension
d’entrée (ve(t)).
2. Transposer cette relation dans le domaine de Laplace et donner alors la relation liant Vs(p)et
Ve(p).
1

DUT2 GEII -ALTERNANCE TRAVAUX PRATIQUES ÉLECTRONIQUE
3. La fonction de transfert liant Vs(p)et Ve(p)est notée F(p). Donner l’expression de celle-ci.
4. La fonction de transfert normalisée pour un système du second ordre est rappelée ci-dessous :
F(p) = Vs(p)
Ve(p)=K
1+2.ξ
ω0p+p2
ω2
0
(1)
Rappeler la signification et identifier les 3 constantes utilisées (K,ξet ω0)
5. Nous nous intéressons désormais à ce même système mais cette fois ci en boucle fermée
(FIGURE 2). Déterminer la fonction de transfert en boucle fermée (FT BF(p)). Quel est l’ordre
de la fonction de transfert en boucle fermée ? Identifier les nouvelles constantes (KBF ,ξBF et
ωBF ). Conclure.
F(p)
Vs(p)
+−
Ve(p)
FIGURE 2 – Système en boucle fermée
2 Manipulation
Câblez le montage de la Figure 1 à l’aide des composants disponibles sur votre table. Réalisez un
essai indiciel (tension d’entrée en créneau d’amplitude 1 V). Visualisez les tensions ve(t)et vs(t)à
l’oscilloscope.
1. Détermination du coefficient d’amortissement et de la pulsation propre :
En vous aidant de l’Annexe 1, déterminez la valeur du dépassement (D1(%)) et de la pseudo-
période (Tp). Déduisez la valeur du coefficient d’amortissement (ξ) de la valeur du dépassement.
De même, déduisez la valeur de la pulsation propre (ω0) de la valeur de la pseudo-période (Tp).
2. Détermination de la valeur des composants :
A partir des mesures de ξet ω0, des résultats de votre préparation et en connaissant la valeur du
condensateur C(C=10 nF), identifier les valeurs des composants Ret L.
3. Remplacez la résistance du montage précédent par une résistance de 33 kΩ. Réalisez un nouvel
essai indiciel. Que se passe-t-il ? Y-a-t-il toujours dépassement ? Calculez les valeurs théoriques
du coefficient d’amortissement (ξ) et de la pulsation propre (ω0).
3 Simulation
Dans cette partie, nous utiliserons le logiciel Scilab. Il s’agit d’un logiciel open source de calcul
numérique. Il est disponible gratuitement à l’adresse suivante : http://www.scilab.org/fr
Nous utiliserons l’éditeur graphique XCOS permettant la simulation de systèmes dynamiques.
1. Penser à créer un répertoire pour enregistrer tous vos fichiers
2. Ouvrir le logiciel SCILAB (accessible depuis votre bureau)
3. Ouvrir l’éditeur XCOS depuis le menu Applications
YAËL THIAUX 2 ANNÉE 2012/2013

DUT2 GEII -ALTERNANCE TRAVAUX PRATIQUES ÉLECTRONIQUE
4. 2 fenêtres apparaissent alors, la première constitue la zone de dessin où seront dessinés les
systèmes à simuler. La seconde (Navigateur de palettes) constitue la bibliothèque où se trouvent
les différents blocs. Pour réaliser vos schémas, de plus amples informations sont disponibles
dans l’Annexe 2.
Travail demandé :
1. Impact du coefficient d’amortissement sur la réponse indicielle :
Dans un premier temps nous allons nous intéresser à l’allure générale de la réponse indicielle de
vs(t)en fonction de la valeur du coefficient d’amortissement ξ. Nous nous trouvons en boucle
ouverte. Réaliser le schéma de la FIGURE 3 sous XCOS. Les valeurs du gain statique et de la
pulsation propre sont données :
–K=1
–ω0=10 rad/s
K
1+2.ξ
ω0p+p2
ω2
0
Ve(p)Vs(p)
FIGURE 3 – Système du second ordre en boucle ouverte
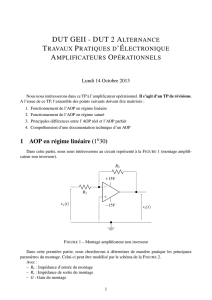
Le schéma XCOS doit ressembler à celui de la FIGURE 4 :
FIGURE 4 – Schéma XCOS d’un système en BO
Simuler le système pour les valeurs suivantes du coefficient d’amortissement :
–ξ=0,25
–ξ=0,5
–ξ=0,75
–ξ=1
–ξ=1,25
Conclure.
2. Régime apériodique :
Nous nous intéressons désormais au schéma de la FIGURE 5 :
Soit τ1=1set τ2=0,8s; identifiez de façon théorique les 3 constantes caractéristiques d’un
système du second ordre (K,ξet ω0). Simulez la réponse indicielle du système sous XCOS.
Existe-t-il un dépassement de la valeur finale de vs(t)? Existe-t-il des différences avec la ré-
ponse indicielle d’un système du premier ordre ? Reprendre l’exemple précédent avec τ1=1
YAËL THIAUX 3 ANNÉE 2012/2013

DUT2 GEII -ALTERNANCE TRAVAUX PRATIQUES ÉLECTRONIQUE
1
1+τ1.p
1
1+τ2.p
Ve(p)Vs(p)
FIGURE 5 – Régime apériodique
set τ2=0,05 s. Déterminez graphiquement le temps de réponse du système à 5% près de la
valeur en régime permanent. Comparez ce temps de réponse à celui d’un système du premier
ordre dont la constante de temps vaut 1 s. Conclure.
3. Boucle fermée :
Réalisez sous XCOS le schéma de la FIGURE 2. On donne K=1, ω0=10 rad/set ξ=0,2.
Comparez sur un même graphique la réponse du système en boucle ouverte et la réponse du
système en boucle fermée. Conclure sur l’impact de la boucle fermée sur le gain statique, la
valeur du premier dépassement et le temps de réponse du système.
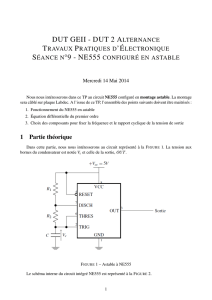
4. Correction proportionnelle :
Conformément à la FIGURE 6, on insère dans la boucle fermée un correcteur proportionnel de
fonction de transfert : C(p)=G. On donne K=1, ω0=10 rad/set ξ=0,2. Pour G=1 ;5 puis
10, simulez le comportement du système et déterminez le gain statique, la valeur du premier
dépassement et le temps de réponse à 5%. Conclure.
FIGURE 6 – Correction proportionnelle
5. Conclusion :
Conclure sur les points suivants :
– Allure de la réponse indicielle d’un système du second ordre en fonction de la valeur de ξ,
– Impact de ξsur la valeur du dépassement et le temps de réponse d’un système pseudo-
périodique,
– Rôle de la boucle fermée,
– Rôle du correcteur proportionnel pour un système du second ordre.
YAËL THIAUX 4 ANNÉE 2012/2013

DUT2 GEII -ALTERNANCE TRAVAUX PRATIQUES ÉLECTRONIQUE
4 Annexe 1 : Identification des paramètres de la fonction de trans-
fert à partir d’un essai indiciel
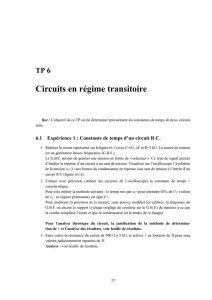
La réponse indicielle d’un système du second ordre avec dépassement est représentée à la FIGURE
7 :
FIGURE 7 – Réponse indicielle d’un système du second ordre avec dépassement
A partir de cette réponse, il est possible de déterminer différents paramètres de la fonction de
transfert, parmi lesquels :
–Temps de réponse à 5% : Il suffit pour mesurer ce temps de réponse de repérer sur le graphique
l’instant à partir duquel la réponse du système reste confinée dans le cylindre délimitant ±5%
de la valeur de la sortie en régime permanent.
–Amplitude du premier dépassement : Pour calculer la valeur (en %) du premier dépassement,
il suffit d’appliquer la formule suivante :
D1%=100 ×Vsmax −Vs∞
Vs∞
(2)
Avec Vs∞la valeur en régime permanent de la tension de sortie. Il est possible de déterminer
la valeur du coefficient d’amortissement à partir de la valeur du premier dépassement grâce à
l’abaque représentée à la FIGURE 8.
–Pseudo-période (Tp) : La pseudo-période de l’oscillation est liée à la pulsation propre de la
fonction de transfert par la relation suivante :
Tp=2π
ω0p1−ξ2(3)
YAËL THIAUX 5 ANNÉE 2012/2013
 6
6
1
/
6
100%