Micro Moteurs piézoélectriques et électrostatiques

Micro moteurs piézo-électriques et électrostatiques - durée 2h - G. Clerc
Actionneurs Electriques
25
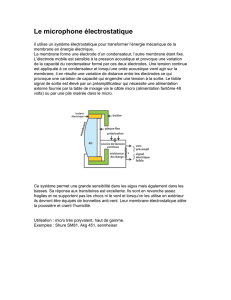
Micromoteurs électrostatiques
Principe
Les systèmes électrostatiques créent des forces par interaction de deux sources de champ
électrique.
Ces sources peuvent être
des conducteurs chargés, portés à des potentiels électriques,
des matériaux diélectriques possédant une polarisation rémanente et appelés électret
des matériaux diélectriques à polarisation induite.
Pour obtenir un actionneur il est nécessaire de se garder une grandeur de commande fournie par
le potentiel appliqué aux conducteurs, ce qui réduit les interactions intéressantes à trois, à savoir :
- potentiel / potentiel, comme dans un simple condensateur à diélectrique unique figure
5.13 (a).
- potentiel / électret, comme dans un condensateur à deux diélectriques en
série et dont l'un est un électret, figure 5.13 (b).
- potentiel / matériau diélectrique, comme dans un condensateur avec deux
diélectriques en parallèle et dont l'un est à polarisation induite figure 5.13(c).

Micro moteurs piézo-électriques et électrostatiques - durée 2h - G. Clerc
Actionneurs Electriques
26
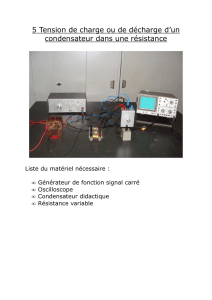
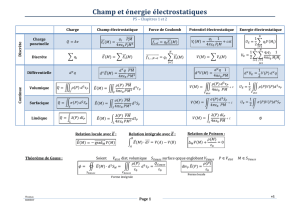
Condensateur simple : figure 5.13a
εo
eo
F
l
V
E
o
La pression électrostatique exercée dans le premier cas sur les armatures du condensateur supposé
idéal s'exprime par : pE
eo o
=1
22
ε
d'où une force F E SVS
e
o o o
o
= =
1
21
2
22
2
ε ε

Micro moteurs piézo-électriques et électrostatiques - durée 2h - G. Clerc
Actionneurs Electriques
27
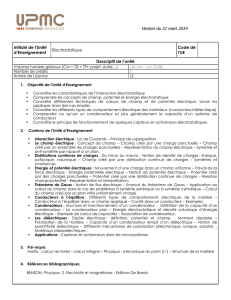
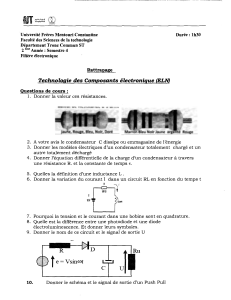
Condensateur à deux diélectriques en série dont l ’un est à polarisation rémanente : figure 5.13b
V
électret
ε
E
Eo
Fεo
e
eo
face métallisée
Soit s1 , la densité de la
charge électrique répartie sur
la face interne de l'électret
La pression électrostatique
vaut
pE
eo o
=1
22
ε
où Eo est encore le champ
dans l'air.
La force est :
FSLVe
o
= +
1
2212
εσ
εavec Lee
o
o
= +
ε ε
Le terme e
σ
ε
1 est la tension d'électret

Micro moteurs piézo-électriques et électrostatiques - durée 2h - G. Clerc
Actionneurs Electriques
28
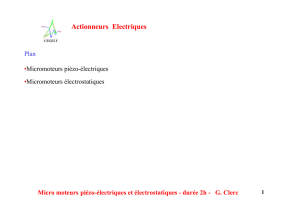
Condensateur à deux diélectriques en parallèle dont l ’un est à polarisation induite : figure 5.13c
eFEV
x
εε
Le diélectrique solide soumis au champ électrique E du condensateur se polarise avec un champ de
polarisation P, proportionnel à E pour être l'objet d'une induction électrique DE P
o
= +ε qui
induit une force qui tend à accroître la coénergie du système en tendant à attirer le diélectrique
mobile dans le condensateur.
La force correspondante s'obtient par dérivation de la coénergie électrostatique stockée entre les
électrodes de capacité C(x) et d'expression :
( )
xCVWe2
2
1
=
′

Micro moteurs piézo-électriques et électrostatiques - durée 2h - G. Clerc
Actionneurs Electriques
29
d'où la force
( )
FW
xVCx
x
e
Vcte
=′
=
=
∂∂∂∂
1
22avec
( ) ( )
CxeS S S
e
oxx
= − +
ε ε
Sx étant la surface du diélectrique dans le condensateur, la force devient :
( )
F V
e
o
= −
1
2
2
ε ε l avec l profondeur du condensateur.
Dans tous les cas de figure la force est attractive puisque la tension V intervient au carré.
Cette tension d'alimentation doit être inférieure à sa valeur disruptive qui provoque le claquage
par arc électrique de l'air sous le champ Eo qui est proportionnel à V.
Pour une distance des électrodes inférieure à 4µm , Ed peut atteindre des valeurs supérieures à
200.106 V/m ce qui donne des énergies volumiques comparables à celle des systèmes
électromagnétiques.
Les actionneurs électriques présentent un intérêt dans le domaine micrométrique et peuvent donc
donner lieu à réalisation de micro-actionneurs.
 6
7
8
9
10
11
12
13
6
7
8
9
10
11
12
13
1
/
13
100%