Actionneurs Electriques

Micro moteurs piézo-électriques et électrostatiques - durée 2h - G. Clerc
Actionneurs Electriques
1
Plan
•Micromoteurs piézo-électriques
•Micromoteurs électrostatiques

Micro moteurs piézo-électriques et électrostatiques - durée 2h - G. Clerc
Actionneurs Electriques
2
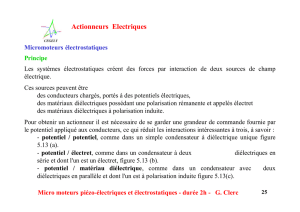
Micromoteurs piézo-électriques
Principe
La piézo électricité est la propriété que présentent certains corps de se polariser
électriquement sous l’action d ’une contrainte mécanique (effet direct) et de se déformer
lorsqu’ils sont soumis à un champ électrique (effet inverse)
Une traction ou une compression mécanique entraînant une variation de leur géométrie, provoque
un état de polarisation électrique du cristal, entraînant l'apparition d'un champ électrique à ses
extrémités. Inversement un tel cristal soumis à un champ électrique est le siège de contraintes
internes mécaniques qui modifient sa géométrie. Dans ce dernier cas la contrainte comprend un
terme proportionnel au champ, c'est l'effet purement piezo-électrique qui nous intéresse, et un
terme proportionnel au carré du champ, c'est l'effet électrostrictif.
La piézo-électricité s observe sur les cristaux non conducteurs dont la maille élémentaire ne
possède pas de centre de symétrie (quartz, le titanate de barrium …). La caractère anisotropique
particulier de la structure cristalline est alors à même de privilégier un axe de polarisation
élecrique de sorte que sous l ’effet d ’une action mécanique, un dipôle apparaît dans chaque
maille du matériau par déplacement des barycentres des charges positives et négatives

Micro moteurs piézo-électriques et électrostatiques - durée 2h - G. Clerc
Actionneurs Electriques
3
Dans les années 50, apparition de nouveaux matériaux du type Pb(Zr-Ti)O3 marquant
l ’apparition des céramiques PZT dont les caractéristiques piézo électrique sont 100 fois plus
prononcées en terme de quantité de charge. De plus, ils ont une température de Curie élevée
(300° à 350°C)
Notations
EChamp électrique
PePolarisation électrique
D = eE+PeInduction électrique
pPression mécanique interne
Ces propriétés électro-mécaniques sont en fait extrêmement complexes. Elles présentent des
effets longitudinaux avec sens de la déformation parallèle au sens du champ appliqué, et des
effets transversaux avec sens de la déformation perpendiculaire au sens du champ appliqué. Par
ailleurs ces effets présentent les phénomènes d'hystérésis et de saturation de façon semblable aux
phénomènes électromagnétiques des matériaux ferromagnétiques.

Micro moteurs piézo-électriques et électrostatiques - durée 2h - G. Clerc
Actionneurs Electriques
4
Ces phénomènes électro-mécaniques peuvent donner lieu à conversion d'énergie électro-
mécanique, avec pertes bien évidemment, si la source de champ débite un courant et si le cristal
déplace une masse qui lui est liée rigidement.
Figure 5.1. - Principe de conversion d'énergie électro-mécanique utilisant l'effet transverse piezo- électrique.
Plcristal charge
Ml
Pt
∆l
Pl
V

Micro moteurs piézo-électriques et électrostatiques - durée 2h - G. Clerc
Actionneurs Electriques
5
Figure 5.2. - Allongement relatif longitudinal d'un matériau piezo-électrique en fonction du champ électrique
appliqué.
0
-EcE
c
-1
-E
m
1Em
kV/m
cycle
première polarisation
a
R
∆
l
l
3.10
-3
Ec champ coercitif
R point de rémanence
Si on applique un champ alternatif et de valeur crête inférieure ou égale à Ec, l'allongement relatif va décrire
une boucle d'hystérésis mineure autour du point de rémanence R, que l'on assimilera à une droite en première
approximation. Selon le sens de la rémanence initiale, cette droite sera de pente positive ou négative, c'est à
dire que sous l'effet d'un champ positif par exemple, selon le sens antérieur d'évolution, le matériau se
contractera ou se dilatera.
Voir
commentaire
 6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
1
/
24
100%