Système Coopératif de Classification Floue Possibiliste avec Rejet d

4thInternationalConferenceonComputerIntegratedManufacturingCIP’200703-04 November 2007
Système Coopératif de Classification Floue
Possibiliste avec Rejet d’Ambiguïté
« Application à la segmentation d’images IRM »
Semchedine Moussa1 , Toumi Lyazid 2 , Moussaoui Abdelouaheb 3
(1) Département d’Informatique - Université Ferhat Abbas de Sétif
(2,3) Ecole doctorale nationale STIC Département d’Informatique - Université Ferhat Abbas de Sétif
[email protected], Toumi_lyazid@yahoo.fr, [email protected]
Résumé- Cet article concerne le problème de la segmentation des
images IRM (imagerie par résonance magnétique) cérébrales. Il
s’agit précisément de coopérer plusieurs classifieurs
automatiques pour tirer parti des complémentarités entre
différentes méthodes ou opérateurs et augmenter ainsi la
robustesse du processus de segmentation. Tout l’enjeu de cette
coopération réside dans la définition de modes de combinaison
adaptés à différentes sources d’informations, pour pouvoir
exploiter au mieux leurs complémentarités et extraire une
information utile et pertinente pour la segmentation.
Notre approche coopère entre l’algorithme FCM (Fuzzy C-
Means) dont la somme des degrés d’appartenance d’un individu
donné à toutes les classes possibles étant égale à 1, et l’algorithme
possibiliste PCM (Possibilistic C-means) qui consiste à chercher
des partitions qui sont basées sur l’idée de typicalité. Afin de
rendre l’algorithme plus robuste face aux imprécisions et aux
données ambiguës qui peuvent influencer considérablement sur
les centres de classes, nous introduisons la notion de rejet
d’ambiguïté qui concerne les individus situés entre les frontières
des différentes classes.
I. INTRODUCTION
Malgré les avancées technologiques dans le domaine
médical et en particulier dans l’imagerie médicale, l’étude du
cerveau humain est un problème ardu et reste un sujet de
recherche de forte actualité, du fait de l’évolution des
techniques d’imagerie, la grande capacité de calcul des
machines…etc. Une des modalités d’imagerie les plus
couramment utilisées, à laquelle nous nous sommes intéressés
dans le cadre de ce travail, est l’Imagerie par Résonance
Magnétique (IRM), qui est devenue un outil indispensable pour
tout examen clinique, elle présente l’avantage d’être non
invasive et permet l’acquisition d’images bi ou
tridimensionnelles sur lesquelles différents contrastes sont
possibles. Cette modalité permet en outre la réalisation
d’études du cerveau aussi bien anatomiques que fonctionnelles
grâce aux techniques d’IRM et d’IRMf (IRM fonctionnelle)
[1].
L’une des opérations indispensables et primordiales pour
tout traitement ultérieur de ces images est évidemment la
segmentation qui consiste à délimiter les structures cérébrales
(matière grise, matière blanche, liquide céphalorachidien) qui
peuvent être utilisées dans plusieurs applications tel que la
morphométrie (mesures des formes), la cartographie
fonctionnelle, la visualisation, et la chirurgie assistée par
ordinateur [2].
La segmentation des IRM cérébrales présente des
particularités par rapport à d’autres domaines d’applications de
la segmentation [2], comme celle des images satellitaires, ou la
segmentation des visages. Ces particularités sont liées
principalement aux bruits, à l’inhomogénéité de la radio
fréquence, au patient lui-même (à cause de ses mouvements
pendant l’acquisition de l’image, etc.), à l’effet du volume
partiel que l’on retrouve lorsqu’un pixel ayant un certain
niveau de gris correspond en réalité à un mélange de deux ou
plusieurs tissus (les pixels sont ici appelés mixels). Cet artéfact
existe principalement aux frontières entre tissus (MG\MB
notamment) [3].
L’objectif de notre travail est de développer une méthode
coopérative de segmentation qui prend en compte, à la fois,
l’aspect flou et possibiliste tout en introduisant la notion de
rejet d’ambiguïté (individus situés entre les frontières des
différentes classes) pour optimiser le positionnement des
centres de classes.
Nous présentons à la deuxième section un état de l’art sur les
méthodes de segmentation d’images où nous insistons sur les
inconvénients des méthodes classiques. Une description
détaillée des algorithmes de segmentation par classification fait
l’objet de la troisième section. Dans la quatrième section, nous
présentons l’approche proposée où le concept de rejet est
introduit. La section cinq quant à elle est consacrée, à la
justification des choix des algorithmes utilisés. Les résultats
obtenus sur les images IRM sont présentés dans la sixième
section. Nous concluons au septième paragraphe
II. MÉTHODES DE SEGMENTATION D’IMAGES
Segmenter, ou délimiter les structures cérébrales (matière
grise, matière blanche, liquide céphalorachidien,…etc.) est une
étape fondamentale pour l’analyse d’images cérébrales. Elle
consiste à créer une partition de l’image observée en un certain
nombre de régions selon un critère déterminé: couleur, texture,
niveau de gris…etc. Une bonne segmentation aide le médecin
par exemple à prendre une décision finale, avant son geste
chirurgical.
Les méthodes de segmentation existantes sont
généralement fondées sur des principes très différents comme
le processus de classification, l’utilisation de modèles de

4thInternationalConferenceonComputerIntegratedManufacturingCIP’200703-04 November 2007
contours déformables ou encore de modèles de
connaissance…etc.
A. Méthodes basées sur les mesures de Similarités
(Approches Région)
Les approches de segmentation régions visent à créer une
partition de l’image en un ensemble de régions homogènes au
sens d’un ou plusieurs critères. On recherche donc à rassembler
les pixels par critères de similarité. On peut distinguer les
méthodes par seuillages, croissance de régions…
Tout comme les méthodes à base de seuillages, les
segmentations par croissance de régions sont simples à mettre
en œuvre, mais parfois coûteuses en temps de calcul. Leurs
avantage réside dans la prise en compte des informations
contextuelles par le mécanisme de croissance et dans la
possibilité d’introduire des informations de plus haut niveau.
Néanmoins, leur inconvénient est lié à la disposition des
germes initiaux. En effet, celle-ci nécessite l’intervention d’un
opérateur. Enfin, nous notons leur utilisation restreinte au
contexte monomodal [3].
B. Méthodes de Détection des Discontinuités (Approches
Contours)
Contrairement aux approches régions, qui cherchent à
former des zones homogènes, les approches contours se basent
sur les discontinuités des images pour déterminer les contours
des régions. On peut distinguer les méthodes dérivatives et les
méthodes fondées sur les modèles déformables.
Les méthodes dérivatives permettent de détecter de manière
simple les ruptures dans une image ou un volume. Les contours
(ou surfaces en 3D) sont assimilés à des points de forts
gradients ou de dérivées secondes nulles. On retrouvera alors
des opérateurs tels que les filtres de Roberts, Sobel, Prewitt,
Deriche [4].
Les méthodes dérivatives, employées pour la segmentation
des images IRM cérébrales, sont relativement peu nombreuses
dans la littérature. Bien que rapides et ne nécessitant pas
d’information a priori, elles ne permettent pas, en général,
d’obtenir des contours fermés. Elles sont en effet très sensibles
au bruit et à la dérive du champ radiofréquence. Leurs
efficacités reposent sur l’existence de contrastes entre les
structures recherchées. Enfin, ces méthodes fournissent
fréquemment de la sous-segmentation ou de la sur-
segmentation [3].
Les algorithmes de segmentation fondés sur les modèles
déformables dérivent des méthodes de contours dynamiques
introduites par Terzopoulos [5], ils ont l’avantage, par rapport
aux méthodes dérivatives, de fournir des contours ou surfaces
fermés.
III. SEGMENTATION PAR CLASSIFICATION
Pour cette famille de méthodes, la segmentation d’une image
est vue comme une subdivision de cette dernière en
différentes classes de telle manière que : les éléments d’une
même classe soient les plus similaires possibles (minimisation
de la variance intra-classe), et les éléments de deux classes
distinctes soient les plus différents possibles (maximisation de
la variance inter-classe). On peut distinguer deux types de
méthodes : les méthodes supervisées et les méthodes non
supervisées (automatiques)
A. Méthodes Supervisées
Les méthodes supervisées nécessitent un ensemble d’images
ou de régions d’intérêt dans l’image déjà étiquetée. Soit, les
données à analyser
{
}
,1
p
j
XxR jN=∈ ≤≤, où
j
x
est un
vecteur forme représentant le pixel j. Cet ensemble de données
est décomposé en deux sous ensembles : un ensemble
d’apprentissage et un ensemble de test. L’ensemble
d’apprentissage est construit par étiquetage manuel des images
ou des régions d’intérêt en Cclasses de tissus
(
)
1,..., c
CC
par
un ou plusieurs experts. Chaque classe i
Cse voit donc affecter
un ensemble d’apprentissage i
E, et les données de l’ensemble
de test sont segmentées en fonction des i
E. Parmi ces
méthodes on peut citer : la segmentation Bayésienne, la
segmentation par les champs de Markov [6], réseaux de
neurones [7] …etc.
Pour notre cas, puisqu’il s’agit de segmenter des images
médicales IRM cérébrales, la classification supervisée de ces
images nécessite donc la création d’une base d’apprentissage
pour chaque classe et pour chaque patient ce qui est en elle
même une tâche très fastidieuse pour les experts [3]. C’est
pour cette raison qu’on s’intéresse aux méthodes non
supervisées.
B. Méthodes Non Supervisées (Automatiques)
L’intérêt des méthodes non supervisées (automatiques) est
qu’elles ne nécessitent aucune base d’apprentissage et aucune
tâche préalable d’étiquetage manuel. La seule intervention de
l’expert se situe à la fin du processus pour identifier les tissus
en comparant les classes calculées avec les classes biologiques.
Les algorithmes non supervisés les plus répandus tendent à
minimiser une fonction coût, dépendant de la distance de
chaque pixel aux prototypes (ou noyaux) des classes. Le
prototype d’une classe étant un point connu dont
l’appartenance à la classe est garantie et où chaque pixel est
assigné à la classe qui lui est la plus proche. Selon la certitude
de la classification que nous voulons obtenir, et la relation
entre les classes, nous pourrons distinguer plusieurs méthodes
de classification :
• Classification HCM (Hard C -Means)
Notons
(
)
, 1..
j
Xxj N==
l’ensemble des vecteurs forme
de
p
R
, avec 12
, ,..., T
jjj jp
xxx x
⎡
⎤
=
⎣
⎦, et
(
)
1,..., c
Bb b=un
ensemble de vecteurs prototypes inconnus, où i
b caractérise la
classei. Dans la méthode HCM un élément de
X
est attribué
à une classe et une seule parmi les C proposées. Dans ce cas,
la fonctionnelle à minimiser est :
2
11
(, , ) ( ,)
CN
ij j i
ij
J
BU X ud x b
==
=∑∑ (1)
Et les solutions au problème s’écrivent :

4thInternationalConferenceonComputerIntegratedManufacturingCIP’200703-04 November 2007
2
1 ²( , ) ( , )
0 sin
ji jk
ij
s
si d x b d x b k i
uon
⎧<∀≠
⎪
=⎨
⎪
⎩ (2)
1
1
N
ij j
j
iN
ij
j
ux
bu
=
=
=∑
∑ (3)
Dans une méthode comme HCM , les éléments sont classés
de façon certaine comme appartenant à une classe et une seule.
Quelle que soit la modalité d’imagerie, cette assertion ne
reflète pas la réalité physique de l'échantillon étudié (bruit,
volume partiel, hétérogénéité de champ, etc.) [1]. D’autres
méthodes permettent d'obtenir une segmentation floue qui
prend en compte ces aspects imprécis et incertains.
• Classification floue FCM (Fuzzy C- Means )
La modélisation de l’imprécision s’effectue en considérant
des frontières graduelles au lieu de frontières nettes entre les
classes. L’incertitude s’exprime par le fait qu’un pixel possède
aussi bien des attributs qui l’assignent à une classe qu’à une
autre. La classification floue assigne donc, non pas à un pixel
une étiquette relative à une classe unique, mais son degré
d’appartenance à chacune des classes. Ces valeurs expriment
l’appartenance incertaine d’un pixel à une région et sont
appelées degrés d’appartenance. Le degré d’appartenance se
situe dans l’intervalle [0, 1] et les classes obtenues ne sont pas
forcément disjointes. Dans ce cas, les données j
x
ne sont plus
assignées à une classe unique, mais à plusieurs par
l’intermédiaire de degrés d’appartenance ij
udu vecteur j
x
à la
classei. Le but des algorithmes de classification est non
seulement de calculer les centres de classe B mais aussi
l’ensemble des degrés d’appartenance des vecteurs aux classes.
Si ij
u est le degré d’appartenance de j
x
à la classei, la matrice
CxN ij
Uu
⎡⎤
⎣⎦
est appelée matrice de C-partitions floues si et
seulement si elle satisfait aux conditions :
{} {}
[
]
1
0,1
1.. , 1..
0
ij
N
ij
j
u
iCjN uN
=
⎧∈
⎪
∀∈ ∀∈ ⎨<<
⎪
⎩∑ (4)
{}
1
1.. 1
C
ij
i
jN u
=
∀∈ =
∑. (5)
la fonctionnelle à minimiser (6), et les solutions (7), (8), au
problème du FCM sont décrites par les formules suivantes :
2
11
(, , ) ( ,)
CN m
ij j i
ij
J
BU X u d x b
==
=∑∑ (6)
1
1
nm
ik k
k
inm
ik
k
ux
bu
=
=
=∑
∑ (7)
1
2/( 1)
2
2
1
(,)
(,)
m
Cji
ij kjk
dxb
udxb
−
−
=
⎡
⎤
⎛⎞
⎢
⎥
=⎜⎟
⎜⎟
⎢
⎥
⎝⎠
⎣
⎦
∑ (8)
Dans ce qui suit nous présentons les étapes de l’algorithme
FCM :
Algorithme FCM
Etape 1 : fixer les paramètres C: nombre de classes,
ε
: seuil
représentant l’erreur de convergence (par exemple
0.001
ε
=
, m : degré de flou, généralement pris entre [1.5,3].
Etape 2 : Initialiser la matrice degrés d’appartenances U par
des valeurs aléatoires dans l’intervalle [0,1].
Etape 3 : mettre à jour le prototype
B
par la relation (7),
Calculer J(B,U,X) par (6),
Etape 4 : mettre à jour la matrice degrés d’appartenance par la
relation (8),
Calculer (, , )
J
BU X par (6),
Etape 5 : Répéter les étapes étape 3 à 4 jusqu’à satisfaction du
critère d’arrêt qui s’écrit : (,,) - (,,)JBUX JBUX
ε
<
• Classification possibiliste PCM (Possibilist C-Means )
Krishnapuram et Keller [8] ont suivi les idées de Zadeh [9]
selon lesquelles (5), ne doit pas contraindre les appartenances
d’un vecteur quelconque j
x
si les classes représentées par les
nuages sont considérées comme ces sous-ensembles flous sur
le domaine
{
}
, 1..
j
Xxj N==
. Les degrés d’appartenance
doivent seulement appartenir à l’intervalle [0,1]. Ainsi, un
nouvel ensemble de contraintes est défini :
{
}
{
}
[
]
1.. , 1.. 0,1
ij
iCjNu∀∈ ∀∈ ∈ (9)
{}
1
i
0
1.. max 0
N
ij
j
ij
uN
jN u
=
⎧<<
⎪
∀∈ ⎨
⎪>
⎩
∑ (10)
La condition (10), assure simplement que la partition floue
résultante de l’algorithme recouvre le domaine
X
. En toute
rigueur, la matrice U résultante n’est plus une C-partition
floue, puisque la contrainte (5), n’est plus satisfaite.
La fonctionnelle à minimiser (11), et les solutions (12),
(13), de l’algorithme PCM deviennent :
2
11 1 1
(, , ) ( ,) (1 )
CN C N
mm
ij j i i ij
ij i j
JBUX ud x b u
η
== = =
=+−
∑∑ ∑ ∑ (11)
1
1
{1.. }
nm
ik k
k
inm
ik
k
ux
iC b u
=
=
∀∈ =
∑
∑ (12)

4thInternationalConferenceonComputerIntegratedManufacturingCIP’200703-04 November 2007
1
21
{1.. } 1
{1.. } (,)
1
ij
m
ji
i
iC u
jN dxb
η
−
⎧
⎪
⎪
∀∈ ⎪=
⎨
∀∈ ⎪⎛⎞
⎪+⎜⎟
⎜⎟
⎪⎝⎠
⎩
(13)
où i
η
est un réel positif déterminant la distance à laquelle le
degré d’appartenance d’un vecteur à la classe iest égal à 0.5.
L’algorithme PCM se déroule en cinq étapes comme le FCM ,
il suffit de remplacer (6), (7), et (8) par les équations (11), (12),
et (13).
IV. ALGORITHME DES C-MOYENNES FLOUES ETENDUES ET
APPROCHE PROPOSEE
A. Les limites du FCM
Un grand nombre d'algorithmes est dérivé du FCM,
utilisant des métriques différentes ou des prototypes de
dimensions supérieures. Citons les FcV (fuzzy c-variétés),
FcE [10] (fuzzy c-elliptotypes), Le FCM et ses algorithmes
dérivés souffrent de plusieurs inconvénients :
• Les degrés d'appartenance sont des degrés relatifs.
Autrement dit, l'appartenance d'un individu à une classe
dépend de l'appartenance de cet individu aux autres
classes. Les fonctions d'appartenance construites sont donc
interdépendantes. Aussi, les estimations des centres des
classes ne correspondent pas aux centres réels ou typiques.
• Les points ambigus (mixels) peuvent avoir des valeurs
d'appartenance élevées et ils peuvent affecter de façon
significative l'estimation des centres des classes.
• Ces algorithmes modélisent dans la phase de
classification l'ambiguïté entre classes à partir de règles de
décisions floues fixées a priori qui peuvent alors affecter
la position des centres [11].
B. Le Rejet d’ambiguïté
Pour réduire un taux d'erreurs excessif dû au bruit et aux
autres facteurs d'incertitude inhérents aux mesures réelles, le
rejet d’ambiguïté apporte une solution intéressante [11].
En classification, un individu kX localisé entre plusieurs
classes peut affecter de façon significative l'estimation des
centres des classes. Dans le but de réduire le risque d’une
mauvaise classification, le rejet d’ambiguïté est utilisé pour
éviter de classer cet individu de façon que [11]:
• Les rejets sont calculés dans l'étape de classification et
non dans l'étape de décision, les données ambiguës sont
alors moins prises en compte dans la détermination des
centres.
• L'algorithme inclut une modélisation de l'hésitation ou de
l'ambiguïté, où des fonctions d'appartenance sont affectées
à tous les sous-ensembles de classes de 21
C
−
plutôt
qu'aux éléments de C seulement.
• Les notions de rejet conduisent à attribuer une fonction de
pondération différente à chaque individu selon que celui-ci
appartient clairement à une classe, à aucune ou bien à
plusieurs classes de façon égale.
• L'apport essentiel de l'algorithme est qu’il permet d'inclure
une modélisation de l'ambiguïté en affectant des fonctions
d'appartenance à tous les sous-ensembles. Il s'agit d'une
approche particulièrement riche et souple, qui est capable
de s'adapter à un très grand nombre de situations.
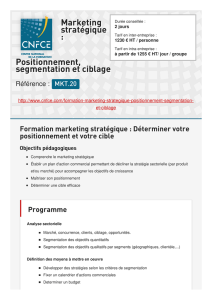
Fig. 1. La partition de l’espace de représentation.
Comme on remarque dans la Figure 1 (b), la classe 123C est
la nouvelle classe qui contient le mélange des individus
ambigus des classes 123,,CCC. Cette nouvelle classe influent
sur le calcul des centres de classes de FCM.
La Figure 2 illustre l’influence des points ambigus
(résultants, par exemple, d’une erreur de mesure ou d’un bruit)
sur la position des centres de classes. Avec la classification
floue, par un algorithme comme le FCM ou une de ses
variantes, on remarque, que les points ambigus (Figure. 2 (a))
(entre les deux nuages) vont être pris en compte lors de la
phase de classification, c’est la cause principale du décalage
des centres des classe1 et classe2 par rapport aux centres réels.
Contrairement aux points de la Figure 2 (b) où la notion de
rejet d’ambiguïté a était introduite, pour remédier au problème
précédent. Dans ce cas là les centres de classes se trouvent aux
milieux des nuages de points.
Fig. 2 . L’influence des points ambigus sur les centres des classes (le cas de 2
classes).
C1
C2 C3
C1
C2 C3
C123
C23
C13
C12
(a) Espace de représentation simple (b) espace de représentation avec
le concept d’ambiguïté
Classe 1 Classe 2
Centre de classe
Point ambigu
(a) Classification floue simple. (b) Classification floue Avec rejet
des points ambigus.

4thInternationalConferenceonComputerIntegratedManufacturingCIP’200703-04 November 2007
C. Nouvelles Fonctionnelles
Un individu est considéré comme ambigu s'il appartient à la
frontière de deux ou plusieurs classes (Figure 3). Ménard [11]
définie la distance de l'individu k
X
à la classe d'ambiguïté
AC∈ par :
2
1
2
()
()
i
i
Aik
CA
AK C
ik
CC
d
dAd
α
∈
∈
=∑
∏
(14)
où le terme A
α
est un nombre positif. ik
d est la distance
classique utilisée dans l'algorithme FCM . La Figure 3, illustre
le comportement de cette distance dans le cas de 3 classes. Les
lignes en pointillés représentent le lieu d’ambiguïté totale
vérifiant :
M
in Ak ik
dd≤
{
}
1,..,ic
∀
∈ (15)
Afin d'introduire le concept d'ambiguïté dans le problème de
la classification floue, nous définissons un nouvel algorithme
fondé sur la minimisation du critère de classification suivant :
),,(),,(),,( XUBJXUBJXUBJ InterFcm
m
I+=
2
2
11,11 Ai
N
i
C
ACA
m
Ai
ij
N
i
C
j
m
ij dUdU ∑∑∑∑ =>⊆
+
==
=
Autrement dit :
22
111
(, , ) NC NC
fcme m r ij
Ai Ai ij
iAC i j
J
BU X U d U d+
=⊆ ==
=∑∑ ∑∑ (16)
où m et
r
sont des exposants contrôlant la quantité de flou de
la partition résultante [11].
Fig.3. Les zones d’ambiguïté.
L’équation (16), est la nouvelle fonction objectif de
l’algorithme FCM, elle va remplacer (6),
L’algorithme développé baptisé FCME (fuzzy c-means
étendu), constitue une phase primaire dans le processus de
coopération proposé. Autrement dit, on fait une première
classification par l’algorithme FCME qui a pour objectif de
calculer les centres des classes B, puis une correction
supplémentaire par l’algorithme PCM sera opérée.
Nous avons utilisé l’algorithme de classification possibiliste
pour segmenter les tissus cérébraux. Notre approche est
gouvernée par plusieurs paramètres, à savoir : l’initialisation
des valeurs, le nombre de classes C, la métrique utilisée et
enfin les vecteurs forme représentant les pixels des images.
V. CHOIX DES ALGORITHMES UTILISES
Nous devons tout d’abord préciser si l’algorithme doit être
supervisé ou non. L’emploi d’un algorithme supervisé
nécessite, comme nous l’avons vu précédemment, une base
d’apprentissage pour chaque classe et pour chaque patient.
Cela constitue un premier inconvénient de ce type de
méthodes. De plus, la littérature rapporte que les méthodes
supervisées en segmentation d’images médicales peuvent être
très dépendantes de la base d’apprentissage [3]. Pour toutes ces
raisons, nous avons opté pour une méthode non supervisée.
A. C-moyennes Floues ou Algorithme Possibiliste ?
Nous indiquons ici les raisons qui nous ont fait préférer
l’algorithme de classification possibiliste par rapport à
l’algorithme classique des C-moyennes floues. Les arguments
portent sur l’interprétation des degrés d’appartenance générées
par les deux méthodes.
• FCM et degrés d’appartenance relatifs
La contrainte de normalisation (5) Utilisée pour la
minimisation de la fonctionnelle (6) est source d’erreur
dans l’interprétation des degrés d’appartenance issus
du FCM . Krishnapuram et Keller [8] donnent une série
d’exemples simples qui illustrent les problèmes associés à
cette contrainte, que nous résumons dans la Figure 4.
Cette figure présente deux nuages de points avec deux
points aberrants
A
et B. L’algorithme des C-moyennes
floues appliqué à deux classes
(
)
2C=avec 2m
=
et une
distance euclidienne calcule les centres 1
O et 2
O . Les
degrés d’appartenance de chaque point aux deux classes
sont présentés dans le Tableau 1.
Les points
A
et B, résultant, par exemple, d’une erreur de
mesure ou d’un bruit, ne doivent pas avoir des degrés
d’appartenance significatifs aux deux classes. De plus, les
degrés d’appartenance de Bdoivent être plus faibles que
ceux de
A
, ce point étant encore plus éloigné des classes.
Néanmoins, en dépit de ces considérations intuitives, la
contrainte (5) impose aux degrés d’appartenance de
A
et
Baux deux classes d'être approximativement égaux à 0.5.
min 12
A
kk
dd=
1
2
3
min 13
Ak k
dd=
min 123
Ak k
dd=
Centres de classes Classes d’ambiguïté
 6
7
8
6
7
8
1
/
8
100%