Cours de m Cours de mécanique des solides rigides canique des

1
Méca. solides rigides - CPMI 2011-2012
ENSM-SE 1
D
DD
Dé
éé
écouvrir la m
couvrir la mcouvrir la m
couvrir la mé
éé
écanique de l
canique de lcanique de l
canique de l’
’’
’ing
inging
ingé
éé
énieur
nieurnieur
nieur
Conna
ConnaConna
Connaî
îî
ître les outils math
tre les outils mathtre les outils math
tre les outils mathé
éé
ématiques de base pour l
matiques de base pour lmatiques de base pour l
matiques de base pour l’
’’
’ing
inging
ingé
éé
énieur
nieurnieur
nieur
Conna
ConnaConna
Connaî
îî
ître les concepts fondamentaux de statique et dynamique des syst
tre les concepts fondamentaux de statique et dynamique des systtre les concepts fondamentaux de statique et dynamique des syst
tre les concepts fondamentaux de statique et dynamique des systè
èè
èmes
mes mes
mes
R
RR
Ré
éé
ésoudre des probl
soudre des problsoudre des probl
soudre des problè
èè
èmes simples
mes simplesmes simples
mes simples
Cycle Préparatoire Médecin-Ingénieur 2011-2012
Cours de m
Cours de mCours de m
Cours de mé
éé
écanique des solides rigides
canique des solides rigidescanique des solides rigides
canique des solides rigides
Pierre Badel
Ecole des Mines Saint Etienne
Méca. solides rigides - CPMI 2011-2012
ENSM-SE 2
Ch. 1 – Introduction générale
Ch. 2 – Introduction à la notion de torseur
Ch. 3 – Torseurs
Ch. 4 – Statique
Ch. 5 – Cinématique
Ch. 6 – Cinématique des liaisons
Ch. 7 – Dynamique
Ch. 8 – Géométrie des masses
Ch. 9 – Cinétique
Ch. 10 – Etude dynamique d’un système
Ch. 11 – Energétique
M
MM
Mé
éé
écanique des solides rigides
canique des solides rigidescanique des solides rigides
canique des solides rigides

2
Méca. solides rigides - CPMI 2011-2012
ENSM-SE 3
Ch. 1 Introduction g
Ch. 1 Introduction gCh. 1 Introduction g
Ch. 1 Introduction gé
éé
én
nn
né
éé
érale
ralerale
rale
Méca. solides rigides - CPMI 2011-2012
ENSM-SE 4
Notre environnement est fait de
Notre environnement est fait de Notre environnement est fait de
Notre environnement est fait de
syst
systsyst
systè
èè
èmes
mesmes
mes
qui
qui qui
qui
interagissent
interagissentinteragissent
interagissent
entre eux.
entre eux.entre eux.
entre eux.
• Interactions électriques,
• chimiques,
• magnétiques,
• mécaniques…
Grande complexit
Grande complexitGrande complexit
Grande complexité
éé
é !
!!
!
On ne peut tout prendre en compte.
On ne considère que certaines interactions, on néglige les autres.
Différentes disciplines de la physique.
Notions de système et de modèle
Ch. 1 Introduction g
Ch. 1 Introduction gCh. 1 Introduction g
Ch. 1 Introduction gé
éé
én
nn
né
éé
érale
ralerale
rale

3
Méca. solides rigides - CPMI 2011-2012
ENSM-SE 5
Notions de système et de modèle
Ch. 1 Introduction g
Ch. 1 Introduction gCh. 1 Introduction g
Ch. 1 Introduction gé
éé
én
nn
né
éé
érale
ralerale
rale
On est toujours amen
On est toujours amenOn est toujours amen
On est toujours amené
éé
és
s s
s à
àà
à faire des hypoth
faire des hypothfaire des hypoth
faire des hypothè
èè
èses, limiter les
ses, limiter les ses, limiter les
ses, limiter les é
éé
études
tudestudes
tudes
Il s’agit d’interprétations physiques de la réalité - fondées sur des hypothèses, et
- basées sur des lois mathématiques.
Mod
ModMod
Modè
èè
èle = repr
le = reprle = repr
le = repré
éé
ésentation imparfaite de la r
sentation imparfaite de la rsentation imparfaite de la r
sentation imparfaite de la ré
éé
éalit
alitalit
alité
éé
é
Ils ont souvent une durée de vie limitée…
On construit des mod
On construit des modOn construit des mod
On construit des modè
èè
èles
lesles
les
?
⇔
Ce cours =
Ce cours =Ce cours =
Ce cours = é
éé
étude des interactions m
tude des interactions mtude des interactions m
tude des interactions mé
éé
écaniques entre solides rigides
caniques entre solides rigidescaniques entre solides rigides
caniques entre solides rigides
é
éé
étude de l
tude de ltude de l
tude de l’é
’é’é
’état de repos/mouvement de syst
tat de repos/mouvement de systtat de repos/mouvement de syst
tat de repos/mouvement de systè
èè
èmes
mesmes
mes
Méca. solides rigides - CPMI 2011-2012
ENSM-SE 6
Hypothèses et limites de la mécanique classique
Ch. 1 Introduction g
Ch. 1 Introduction gCh. 1 Introduction g
Ch. 1 Introduction gé
éé
én
nn
né
éé
érale
ralerale
rale
Systèmes matériels non variables.
Un système matériel est constitué d’éléments individualisables : les points matériels.
Un ensemble de points matériels dont les distances entre points sont constantes
= un solide indéformable (ou rigide).
La masse ne dépend que de la nature du matériau.
Limitations
LimitationsLimitations
Limitations
(on sort du domaine de validité des modèles) :
• Très petits systèmes matériels. Exemple : Taille < m.
• Vitesses proches de celle de la lumière.
• Autres interactions physiques peuvent être non négligeables.
Robotique, automobile, biom
Robotique, automobile, biomRobotique, automobile, biom
Robotique, automobile, biomé
éé
écanique
canique canique
canique musculo
musculomusculo
musculo-
--
-squelettique
squelettiquesquelettique
squelettique…
……
…
Applications

4
Méca. solides rigides - CPMI 2011-2012
ENSM-SE 7
Méthodologie générale
Ch. 1 Introduction g
Ch. 1 Introduction gCh. 1 Introduction g
Ch. 1 Introduction gé
éé
én
nn
né
éé
érale
ralerale
rale
Dans un syst
Dans un systDans un syst
Dans un systè
èè
ème, on va s
me, on va sme, on va s
me, on va s’
’’
’int
intint
inté
éé
éresser
resser resser
resser à
àà
à chacun des solides :
chacun des solides : chacun des solides :
chacun des solides :
Isoler chaque solide.
Isoler chaque solide.Isoler chaque solide.
Isoler chaque solide.
Analyser ses mouvements (6
Analyser ses mouvements (6 Analyser ses mouvements (6
Analyser ses mouvements (6 ddl
ddlddl
ddl, 6 param
, 6 param, 6 param
, 6 paramè
èè
ètres).
tres).tres).
tres).
Analyser les actions m
Analyser les actions mAnalyser les actions m
Analyser les actions mé
éé
écaniques ext
caniques extcaniques ext
caniques exté
éé
érieures appliqu
rieures appliqurieures appliqu
rieures appliqué
éé
ées sur ce solide.
es sur ce solide.es sur ce solide.
es sur ce solide.
Analyser les relations entre ces deux derniers.
Analyser les relations entre ces deux derniers.Analyser les relations entre ces deux derniers.
Analyser les relations entre ces deux derniers.
Voir cours sp
Voir cours spVoir cours sp
Voir cours spé
éé
écifique.
cifique.cifique.
cifique.
Rappels mathématiques
Méca. solides rigides - CPMI 2011-2012
ENSM-SE 8
Ch. 2 Introduction
Ch. 2 Introduction Ch. 2 Introduction
Ch. 2 Introduction à
àà
à la notion
la notionla notion
la notion
de torseurs
de torseursde torseurs
de torseurs

5
Méca. solides rigides - CPMI 2011-2012
ENSM-SE 9
Point mat
Point matPoint mat
Point maté
éé
ériel
riel riel
riel
Portion de l’espace pourvue de matière et assez petite pour être considérée ponctuelle.
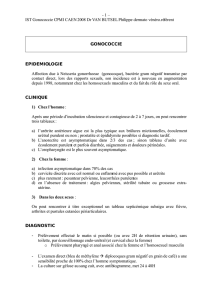
Solide ind
Solide indSolide ind
Solide indé
éé
éformable
formableformable
formable
Domaine contenant un ensemble de points matériels gardant des distances fixes entre
eux au cours du temps
Remarque :
Remarque :Remarque :
Remarque :
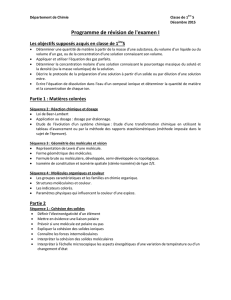
Il s’agit de modèles. Tout solide est déformable ! Plus ou moins… Cf. second semestre
1
1 1
1 –
––
– Mod
ModMod
Modé
éé
élisation d
lisation dlisation d
lisation d’
’’
’un solide
un solideun solide
un solide
Définitions
Ch. 2 Introduction
Ch. 2 Introduction Ch. 2 Introduction
Ch. 2 Introduction à
àà
à la notion de torseur
la notion de torseurla notion de torseur
la notion de torseur
Petites déformations de surface Grandes déformations
Méca. solides rigides - CPMI 2011-2012
ENSM-SE 10
1
1 1
1 –
––
– Mod
ModMod
Modé
éé
élisation d
lisation dlisation d
lisation d’
’’
’un solide
un solideun solide
un solide
Repérage d’un solide
Ch. 2 Introduction
Ch. 2 Introduction Ch. 2 Introduction
Ch. 2 Introduction à
àà
à la notion de torseur
la notion de torseurla notion de torseur
la notion de torseur
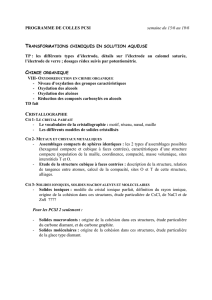
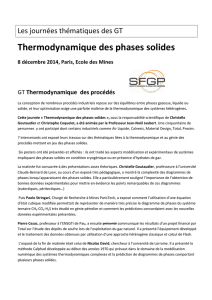
Soient 2 solides S
Soient 2 solides SSoient 2 solides S
Soient 2 solides S
0
00
0
et S
et Set S
et S
1
11
1
ind
indind
indé
éé
éformables
formablesformables
formables
On peut associer un rep
On peut associer un repOn peut associer un rep
On peut associer un repè
èè
ère R
re Rre R
re R
0
00
0
et R
et Ret R
et R
1
11
1
à
àà
à chacun ( = 1 point + 1 base).
chacun ( = 1 point + 1 base).chacun ( = 1 point + 1 base).
chacun ( = 1 point + 1 base).
Relativement
Relativement Relativement
Relativement à
àà
à R
RR
R
0
00
0
:
::
:
3 paramètres de positionnement d’1 point :
3 paramètres de positionnement d’1 base / l’autre : par exemple,
les angles d’Euler.
S
0
S
1
1
x
1
z
1
y
O
1
0
x
0
z
0
y
O
0
0 1 0 0 0
O O = xx + yy + zz
6 param
6 param6 param
6 paramè
èè
ètres n
tres ntres n
tres né
éé
écessaires pour le rep
cessaires pour le repcessaires pour le rep
cessaires pour le repé
éé
érage d
rage drage d
rage d’
’’
’un solide
un solideun solide
un solide
 6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
1
/
66
100%