Complexité paramétrée (3) Recherche de noyaux


Noyaux exponentiels
Edge Clique-Cover
Longest Path
Algorithmes de distillation et de composition
Conjecture de ou-distillation
Non-existence de noyau polynomial
Exemples
Transformations param´etr´ees polynomiales
D´efinition et exemple
R´eductions non-triviales
Compositions crois´ees
D´efinition et th´eor`emes
Dominating set
Autres techniques
et-composition
Bornes inf´erieures polynomiales

Observation
Le th´eor`eme prouvant, pour un probl`eme param´etr´e (Q, κ),
l’´equivalence entre l’existence d’un noyau et son appartenance `a la
classe de complexit´e FPT, ne permet que de d´eduire des noyaux de
tailles exponentiels.
IPeut-on d´emontrer que certains probl`emes n’admettent pas de
noyau polynomial ?

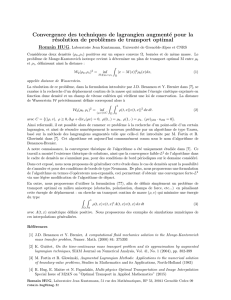
L’exemple de Edge Clique-Cover
y
x
IUn graphe G= (V,E) et un param`etre k∈N
IPeut-on couvrir les ar`etes Epar au plus kcliques ?
Preuve : Supposons qu’il existe kcliques C1. . . Ckcouvrant E.
A chaque sommet xon asscocie un verteur Cde kbits tel que
C[x,i]=1 ⇐⇒ x∈Ci
Observation : ∀i∈[k]C[x,i] = C[y,i] ssi N[x] = N[y]
Probl`eme
Edge Clique-Cover admet-il un noyau polynomial ?

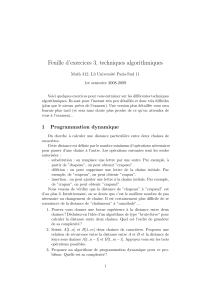
L’exemple de Edge Clique-Cover
y
x
Th´eor`eme [Gramm, Guo, H¨uffner, Niedermeier]
Edge Clique-Cover admet un noyau de taille 2ksommets.
Preuve : Supposons qu’il existe kcliques C1. . . Ckcouvrant E.
A chaque sommet xon asscocie un verteur Cde kbits tel que
C[x,i]=1 ⇐⇒ x∈Ci
Observation : ∀i∈[k]C[x,i] = C[y,i] ssi N[x] = N[y]
Probl`eme
Edge Clique-Cover admet-il un noyau polynomial ?
 6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73
74
75
76
77
78
79
80
81
82
83
84
85
86
87
88
89
90
91
92
93
94
95
96
97
98
99
100
101
102
103
104
105
106
107
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73
74
75
76
77
78
79
80
81
82
83
84
85
86
87
88
89
90
91
92
93
94
95
96
97
98
99
100
101
102
103
104
105
106
107
1
/
107
100%