Mesure de performances

Mesure de performances
[Architecture des ordinateurs,
Hennessy & Patterson, 1996]

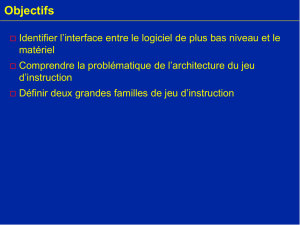
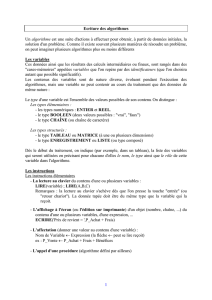
Croissance des performances des
microprocesseurs
Avant le milieu des
années 80, le gain
dépendait de la
technologie.
Après, le gain est
dû à de nouvelles
idées
architecturales.

1. La performance des processeurs
Comment dire qu’un ordinateur est plus rapide qu’un
autre?
Que donneriez-vous comme mesure de performance
d’un ordinateur ?

1. La performance des processeurs
Comment dire qu’un ordinateur est plus rapide qu’un
autre?
L’utilisateur est intéressé par la réduction du temps de
réponse
Temps écoulé entre le début et la fin d’un
événement (ou temps d’exécution)
Le responsable système est intéressé par l’augmentation
du débit :
la nombre de travaux effectués en un temps
donné

a. Temps de réponse
Dire d’un ordinateur (X) est n fois plus rapide qu’un autre
(Y) sur une tâche signifie :
Comme la performance est l’inverse du temps
d’exécution :
n
exécutiondTemps
exécutiondTemps
X
Y
=
'
'
Y
X
X
Y
ePerformanc
ePerformanc
exécutiondTemps
exécutiondTemps
n
==
'
'
 6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
1
/
56
100%