Stratégie d`alimentation des Systèmes sur Puce RF très

Stratégie d’alimentation des Systèmes sur Puce RF
très faible consommation
Thomas COULOT, Frédéric HASBANI
Power Management Design Team
STMicroelectronics
850, rue Jean Monnet
F38920 Crolles - France
Estelle LAUGA, Jean-Michel FOURNIER
IMEP-LAHC UMR 5130
3, rue Parvis Louis Néel – BP 257
Minatec
F38016 Grenoble Cedex 1 - France
Email : thomas.coulot@grenoble-inp.org
Résumé
Ces travaux concernent l’étude d’une stratégie
d’alimentation adaptée aux systèmes sur puce RF très faible
consommation. Une modélisation de la partie bande de base
de l’émetteur est réalisée afin de montrer la relation entre les
performances et les variations de l’alimentation. Le résultat
sera utilisé pour mettre en place une architecture
d’alimentation optimisée. Enfin, les résultats de mesure d’un
bloc de cette future architecture, réalisé en technologie
CMOS 90nm de STMicroelectronics, sont présentés.
1. Introduction
Un réseau de capteurs sans fils [1], également appelé
Wireless Sensor Network (WSN) est constitué d'éléments
communicants qui forment les nœuds du réseau. La
communication des capteurs entre eux ou des capteurs
avec la base de collecte de données s'opère par ondes
radio.
Chaque nœud intègre différents composants : une
source d’énergie, des périphériques constitués de capteurs
ou d’actionneurs, un processeur et un émetteur-récepteur.
L’autonomie énergétique de ces nœuds peut être assurée
par des cellules photovoltaïques, permettant à chaque
nœud de créer et de disposer de leur propre énergie (une
batterie intégrée en assure le stockage).
Ce type de réseau intelligent de capteurs sans fils
autonomes en énergie peut être configuré pour avoir
plusieurs fonctions. Chaque nœud a une mission propre,
fonction des périphériques qu'il contient. Il peut
communiquer les informations concernant cette mission, à
l'ensemble du réseau ou à la tête de réseau.
Si la base collectant les données est reliée à Internet,
on peut alors imaginer un grand nombre d'applications
dans de multiples domaines : industriel, domotique
(Figure 1), aide à la personne...
La technologie a un rôle central dans le rendement
énergétique et dans le coût du système complet. Un effort
important est donc mis sur le développement d'une
technologie ultra-basse consommation. Ces attentes
forcent aussi à changer la façon de réaliser les émetteurs-
récepteurs RF, partie gourmande en énergie, et notamment
leurs stratégies d'alimentation [2].
Ce papier s’organise de la façon suivante. Tout
d’abord, le défi à relever dans la mise en place d’une
stratégie d’alimentation pour de telles applications est
présenté. Puis, la méthodologie de conception est décrite.
La dernière partie présente un régulateur de tension
linéaire innovant conçu et testé en technologie CMOS
90nm de STMicroelectronics.
Figure 1. Exemple de réseau de capteurs sans fils.
2. Une stratégie d’alimentation : un réel défi
La Figure 2 représente les différents blocs composants
les Systèmes sur Puce RF très faible consommation. On y
trouve le(s) régulateur(s) de tension qui alimente(nt)
ensuite les blocs analogiques, RF ainsi que les blocs
numériques.
Batterie Régulateur(s)
de tension
Blocs
analogiques (RF)
et numériques
Vbat Vdd
Systèmes sur Puce très faible consommation
Figure 2. Schéma bloc des Systèmes sur Puce RF très
faible consommation.
Afin de limiter la consommation du système sur puce,
les régulateurs de tension doivent consommer le moins
possible. Les blocs analogiques et RF doivent également
être les moins gourmands possibles en énergie. Les
fonctions RF présentent donc des architectures optimisées
en termes de consommation, ce qui les rend par contre
plus sensibles aux variations de l’alimentation.

L’alimentation de ces blocs doit donc être la moins
bruitée possible sur une large bande de fréquence. Elle
doit avoir un PSR (« Power Supply Rejection ») le plus
élevé possible. Le PSR définit la capacité que présente un
système à minimiser l’impact des variations de la tension
d’alimentation sur le signal de sortie.
2.1 Une demande particulière
Afin de limiter leur consommation, les systèmes RF
fonctionnent dans différents modes. Selon les besoins, les
blocs analogiques, RF et numériques sont soit éteints, soit
en veille, soit actifs [3]. Cette technique réduit
considérablement la consommation de l’émetteur-
récepteur sans dégrader ses performances. Les trois
principaux modes de fonctionnement sont :
• « Power Down Mode » : seuls les blocs qui
permettent le réveil sont actifs, le reste du
système est éteint.
• « Idle Mode » : tout le système est alimenté, il est
à l’écoute d’un signal qui le réveillerait.
• « Active Mode » : émission/réception des
données. Ce mode est utilisé seulement lors de
transactions de données.
Ces modes de fonctionnement impliquent la mise en
place d’une stratégie d’alimentation dynamique avec un
réveil rapide. En effet, le temps de démarrage des
régulateurs doit être inférieur au temps de transmission
d’une trame de données par exemple.
De plus, une application à très faible consommation
comme les réseaux de capteurs sans fils doit présenter
également un faible coût. La puce RF doit donc avoir une
surface la plus faible possible et ne pas nécessiter de
composants externes (pas de capacité de découplage ni
d’inductance pour les régulateurs). L’architecture de
l’alimentation doit être constituée de régulateurs adaptés,
de faibles surfaces et sans composants externes.
2.2 Etat-de-l’Art des stratégies d’alimentation
Actuellement, les régulateurs linéaires de type Low
Drop Out (LDO) sont connectés directement à la batterie
afin d'alimenter les parties RF, analogiques et numériques
[4] [5] [6] (Figure 3). Les avantages d'une telle solution
sont la faible taille de ce genre de circuit et leur faible
coût. Cependant, leur rendement énergétique peu élevé
handicape sévèrement l'autonomie et donc le temps de vie
de la batterie.
LDO LDO
Fonctions
RF Numérique
Vbat
Figure 3. Etat-de-l’Art des stratégies d’alimentation.
Sachant que les fonctions RF représentent environ
50% de la consommation au sein d'un nœud [1], la mise
en place d'une stratégie intelligente dédiée à la RF devient
cruciale pour atteindre l'objectif principal, l'augmentation
de l'autonomie.
2.3 Un réel manque de stratégie
La conception d’un émetteur-récepteur RF est réalisée
à partir d’un cycle de conception en V (méthodologie
descendante/montante). Ainsi, elle permet à différents
groupes au sein d’un même projet d’évoluer du « besoin »
au « produit ». A partir d’un cahier des charges, une
analyse fonctionnelle est effectuée, ce qui permet un
découpage en différentes fonctions. Par la suite, ces
fonctions donneront lieu à des architectures distinctes.
Une fois l’architecture décidée, les concepteurs analysent
chaque bloc unitaire, les conçoivent et les simulent.
Le problème est que l’architecture de l’alimentation
n’est pas étudiée lors de l’analyse fonctionnelle. Les
spécifications et les répartitions des différentes contraintes
n’apparaissent pas dans le cahier des charges. Le
concepteur va donc réaliser et simuler les fonctions RF en
utilisant une alimentation idéale. Il ne prendra pas en
compte les bruits apportés par l’alimentation, l’impédance
ramenée par l’alimentation ni les perturbations des blocs
voisins qui passent par ces chemins.
L’étude d’une stratégie d’alimentation devient donc
indispensable dans la conception de circuits très faibles
consommations afin d’obtenir la meilleure optimisation,
les meilleurs compromis et performances possibles.
3. Proposition d’une stratégie
Pour faciliter la phase de conception des futurs
émetteurs-récepteurs et de leur stratégie d’alimentation,
une démarche de modélisation a été définie et pourra être
appliquée lors de la conception des circuits. Il est
envisageable d’obtenir un modèle spécifique à
l’architecture du circuit tout en étant réutilisable lorsque
certains paramètres (technologiques ou dimensionnels)
seront modifiés.
3.1 Motivations de l’action de modélisation
Bien qu’il soit possible de simuler individuellement
les circuits constituant un émetteur-récepteur, ils ne
peuvent pas être analysés dans le cadre d’un
fonctionnement complet en émission ou en réception en
restant au niveau transistor pour une analyse de réjection
d’alimentation par exemple. En effet, le nombre de nœuds
et la complexité des équations des modèles transistors font
que les capacités des stations de travail s’avèrent
insuffisantes pour ce genre de tâche.
Il est donc à ce niveau nécessaire de procéder à la
modélisation du circuit afin de garantir que le
comportement soit conforme à nos attentes.
Cette démarche de modélisation va permettre d’une
part une vérification rapide de l’ensemble des propriétés
des circuits créés (conception montante) et, d’autre part, la
détermination rapide des principales caractéristiques des
blocs d’alimentation afin qu’ils respectent les
spécifications (conception descendante).

3.2 Modélisation descendante
Dans le cas de la modélisation descendante, la
première étape consiste à modéliser les chemins entrée-
sortie des blocs RF de la chaîne. A ces premiers modèles,
on y ajoute tous les chemins d’alimentation, c’est-à-dire
les chemins VDD-entrée, VDD-sortie, VDD-polarisations
internes mais également les chemins inverses afin
d’obtenir un modèle complet (illustré par la Figure 4).
MODELE
BLOC RF
POLAR
IN OUT
VDD VDD
Figure 4. Modélisation du bloc RF.
Pour résumer, les blocs modélisés possèdent quatre
accès : une entrée/sortie IN, une entrée/sortie OUT, une
entrée/sortie VDD et une entrée/sortie POLAR. Ces
modèles sont ensuite simulés ensemble pour aboutir à une
modélisation système qui permet de concevoir une
stratégie d’alimentation adaptée et de vérifier que le
système satisfait les objectifs qui avaient été fixés.
La modélisation qui a été mise en œuvre a ainsi pour
but de vérifier le comportement du circuit RF (analyse
montante) et de concevoir la stratégie d’alimentation
(analyse descendante). On pourra ainsi, lors de
simulations au niveau système, vérifier l’impact d’une
alimentation bruitée sur le reste de la chaîne réception-
émission et sur ses performances RF.
3.3 Langage de modélisation utilisé [7]
Le langage de modélisation utilisé est le Verilog-A.
C’est une extension du langage de modélisation Verilog
(IEEE 1364, « Verilog Hardware Description
Language »). Il permet une modélisation exclusivement
analogique des circuits. Parmi les propriétés de ce
langage, on peut lister les fonctions de bruit, le contrôle
exercé sur le pas calcul du simulateur ou encore les
nombreuses fonctions mathématiques permettant une
adaptation des équations pour concorder avec les
caractéristiques observées.
Le langage Verilog-A présente l’avantage d’être
utilisable avec des simulateurs tels que Spectre-RF de
Cadence et avec Eldo-RF de Mentor Graphics.
3.4 Exemple de modélisation : la bande de base
L’objectif de la modélisation en Verilog-A des circuits
travaillants en bande de base est de permettre de retrouver
le même comportement du circuit que celui simulé au
niveau transistor mais de manière plus rapide. Parmi les
propriétés à retrouver dans le modèle, on peut notamment
citer les impédances d’entrée et de sortie des blocs RF
mais également l’impédance des blocs vu par
l’alimentation, leur consommation en courant en fonction
du signal et des perturbations de l’alimentation, la
variation de l’entrée et de la sortie des blocs en fonctions
des ondulations de l’alimentation et les réjections de
l’alimentation de chaque bloc.
L’architecture du circuit travaillant en bande de base à
modéliser est la suivante :
PMA
VGA
FLT
RXBB
Figure 5. Architecture de la bande de base étudiée.
Elle est constituée d’un amplificateur (« Post Mixer
Amplifier » (PMA)), un filtre passe-bande et d’un
amplificateur à gain variable (VGA).
La première vérification concerne le comportement
« petit signal » des modèles de ces trois blocs. La Figure 6
représente le comportement des modèles du PMA, du
filtre et du VGA et la simulation des schémas des mêmes
blocs au niveau transistor quand l’alimentation est excitée
en régime « petit signal ». Il faut en effet pouvoir garantir
que les modèles intègrent bien les réjections propres de
chaque bloc.
1 100 10K 1M 100M
1100 10K 1M 100M
1 100 10K 1M 100M
1 100 10K 1M 100M
Fréquence (Hz) Fréquence (Hz)
Fréquence (Hz) Fréquence (Hz)
Figure 6. Comparaison du régime « petit signal » des
blocs avec leurs modèles.
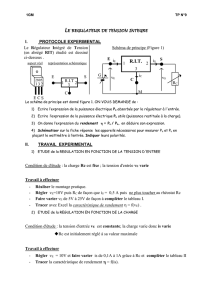
La vérification suivante consiste à s’assurer que le
comportement en régime transitoire « grand signal » des
différents blocs soit respecté. La Figure 7 représente le
comportement temporel de chaque bloc quand
l’alimentation varie sinusoïdalement avec une amplitude
de 50mV et à la fréquence de 10MHz.

-0.02
-0.015
-0.01
-0.005
0
0.005
0.01
0.015
0.02
2.00E-06 2.20E-06 2.40E-06 2.60E-06 2.80E-06 3.00E-06
0.57
0.58
0.59
0.6
0.61
0.62
0.63
0.64
0.65
2.00E-06 2.20E-06 2.40E-06 2.60E-06 2.80E-06 3.00E-06
0.56
0.57
0.58
0.59
0.6
0.61
0.62
0.63
0.64
0.65
2.00E-06 2.20E-06 2.40E-06 2.60E-06 2.80E-06 3.00E-06
1.14
1.16
1.18
1.2
1.22
1.24
1.26
2.00E-06 2.20E-06 2.40E-06 2.60E-06 2.80E-06 3.00E-06
2.0 2.2 2.4 2.6 2.8 3.0
1.14
1.26
1.16
1.18
1.20
1.22
1.24
Temps (μs)
VDD (V)
1.14
1.16
1.18
1.2
1.22
1.24
1.26
2.00E-06 2.20E-06 2.40E-06 2.60E-06 2.80E-06 3.00E-06
2.0 2.2 2.4 2.6 2.8 3.0
1.14
1.26
1.16
1.18
1.20
1.22
1.24
Temps (μs)
VDD (V)
2.0 2.2 2.4 2.6 2.8 3.0
2.0 2.2 2.4 2.6 2.8 3.0
2.0 2.2 2.4 2.6 2.8 3.0
Temps (µs)
Temps (µs)
Temps (µs)
PMA (V)FLT (V)VGA (V)
0.57
0.58
0.59
0.60
0.61
0.62
0.63
0.64
0.65
-0.02
-0.015
-0.01
-0.005
0
0.005
0.01
0.015
0.02
0.56
0.57
0.58
0.59
0.60
0.61
0.62
0.63
0.64
0.65
Verilog-A
Transistor
Verilog-A
Transistor
Verilog-A
Transistor
Figure 7. Comparaison du régime transitoire des blocs
avec leurs modèles Verilog-A.
Les résultats obtenus avec les simulations des modèles
Verilog-A démontrent la fiabilité et l’efficacité des
modèles. Le gain de temps réalisé (simulation 300 fois
plus rapide) permet de diminuer la durée de
développement des alimentations et de permettre la
simulation complète du système lors de sa conception.
Une fois la chaîne RF complètement modélisée, il
suffira de proposer plusieurs stratégies d’alimentation et
de choisir, selon les contraintes et les performances, la
plus adaptée à l’application.
4. Conception d’un régulateur innovant
Dans les stratégies d’alimentation actuelles, les
régulateurs de tension de type Low Drop Out (LDO)
servent d'interface entre la batterie et les circuits intégrés.
Le but du régulateur linéaire est de délivrer en sortie une
tension stabilisée fixe, et ce quel que soit le courant
demandé par le système en aval et quelle que soit la
tension d'alimentation fournie par la batterie en amont.
Pour gagner sur l'autonomie de la batterie, on cherche à
repousser la limite basse d'alimentation du régulateur, ce
qui revient à définir un minimum entre la sortie
d'alimentation en dessous duquel l’application ne soit plus
alimentée. De ce fait, on utilise une catégorie de
régulateur qui se caractérise par une faible chute de
tension d'où son appellation de régulateur Low Drop Out.
Afin d’augmenter le rendement énergétique du
système, un régulateur à découpage est souvent cascadé
en amont de ces régulateurs linéaires. Le principal
inconvénient de cette architecture est le bruit engendré par
les commutations du régulateur à découpage. Cette
architecture impose donc au régulateur linéaire d’avoir un
fort PSR sur une large bande de fréquence (~20MHz).
Cependant, les régulateurs linéaires classiques ne peuvent
pas rejeter de telles ondulations à des fréquences aussi
élevées à cause de leur structure intrinsèque.
Un régulateur innovant [8] constitué de plusieurs
boucles de rétroaction est présenté. Il assure une réjection
de 45dB jusqu’à 100MHz avec seulement 47nF de
capacité de découplage.
4.1 Architecture du régulateur
La Figure 8 décrit l’architecture du régulateur linéaire
conçu pour maintenir une faible sensibilité aux variations
de la tension d’alimentation aux hautes fréquences. Pour
compenser le régulateur sans sacrifier la réjection de
l’alimentation ou augmenter la consommation, une
seconde boucle de rétroaction est introduite, ce qui permet
de stabiliser le gain et d’augmenter la bande passante tout
en conservant la stabilité. L’utilisation d’une charge
dupliquée sous forme de modèle équivalent à la charge
réelle permet d’améliorer les performances. En effet, cette
boucle locale va permettre une estimation du bruit à
laquelle la charge réelle va être soumise et ainsi, l’étage
de sortie sera piloté en fonction de cette estimation d’où
une meilleure réjection sur la charge réelle.
Figure 8. Architecture du LDO.
Une boucle principale (
A
1
et
P
5
) régule la tension de
sortie
V
reg
chargée par la charge
Z
load
. La seconde
boucle de rétroaction (
A
2
et
P
4
) est utilisée pour
augmenter le PSR à hautes fréquences, à travers une
réplique miniaturisée de la charge
Z
replica
. Cette seconde
boucle permet de réinjecter les variations de
l’alimentation dans la boucle de contrôle du LDO, ce qui
diminue l’impact de ces variations sur le nœud de sortie.
Pour obtenir une réjection optimale, la tension aux
bornes du réplica
V
rep
et la tension aux bornes de la
charge
V
reg doivent réagir de la même manière aux bruits
de l’alimentation. Le réplica doit ressembler exactement à
la charge : comportement tension/courant, bruits…

A hautes fréquences, la boucle du réplica, qui est plus
rapide que la boucle principale, prend le contrôle pour
stabiliser le LDO et rejeter les ondulations de la tension
d’alimentation. A basses fréquences, les deux boucles
fonctionnent et sont en compétition pour stabiliser le
LDO. Une petite différence entre la charge et le réplica
combinée à une différence de gains entre les boucles a
pour conséquence une variation de la réjection en DC.
Pour éviter la variation de PSR à basses fréquences, un
filtre passe-haut [9] est ajouté dans la boucle du réplica,
ce qui permet de filtrer les variations de l’alimentation,
l’offset DC et les composantes basses fréquences de
V
rep , correspondant à la différence entre la charge et le
réplica. Grâce à ce filtre, le PSR reste constant à basses
fréquences, indépendant de la ressemblance entre la
charge et le réplica et il dépend uniquement du gain de
l’amplificateur.
4.2 Résultats de mesure
Le LDO a été fabriqué en technologie CMOS 90nm
STMicroelectronics. L’aire totale du LDO est de
0.0088mm ² sans le circuit de type bandgap pour générer
la tension de référence. Une capacité extérieure de 47nF
est utilisée pour stabiliser le LDO. Elle possède une
résistance équivalente en série de 32mΩ et une inductance
équivalente en série de 600pH.
La Figure 9 montre la carte de test avec le socket RF
utilisé.
Figure 9. Carte de test du LDO.
Le régulateur fonctionne avec une tension d’entrée
allant de 1.4V à 3.3V et la tension de sortie est de 1.2V.
La tension de déchet du régulateur est donc de 200mV. Le
LDO consomme 200µA avec une alimentation de 2V.
La charge à alimenter est un oscillateur contrôlé en
tension (VCO). Il est intégré sur la même puce que le
LDO. Le filtre passe-haut implémenté est de type GmC.
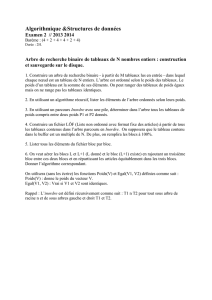
Pour mesurer la réjection de l’alimentation, un
analyseur de réseau HP8753D a été utilisé pour mesurer le
niveau de signal à l’entrée et à la sortie du LDO. On
mesure le paramètre S21 en balayant la fréquence par un
signal sinusoïdal sur la bande souhaitée. La réjection
d’alimentation en est déduite. Le signal sinusoïdal a une
amplitude de 25mV pour éviter de perturber le point de
polarisation du LDO. La comparaison entre le PSR
mesuré et simulé est montrée sur la Figure 10. Le LDO
possède une réjection de 45dB à 100MHz. A partir de
20MHz, le PSR commence à augmenter à cause des pôles
internes de la structure et de la résonnance de la capacité
de découplage.
100K 1M 10M 100M
-45
-50
-55
-60
-65
-70
-75
-80
Fréquence (Hz)
PSR (dB)
Figure 10. Comparaison entre la réjection simulée et
mesurée.
5. Conclusion
Dans ce papier, une stratégie permettant de prendre en
compte, au stade de la conception, l’effet des
perturbations induites par l’alimentation des différents
blocs constituant un émetteur-récepteur RF très faible
consommation est présentée. Une modélisation de la
chaîne RF permet de simuler le système complet. A partir
de ces simulations, les liens entre les performances et les
variations de l’alimentation sont établis et des
architectures d’alimentation optimisées et adaptées en sont
déduites.
Un composant central de cette architecture, un
régulateur de tension linéaire LDO, est aussi présenté. Ce
régulateur linéaire innovant dédié à l’alimentation d’une
fonction RF (VCO) a été réalisé en technologie CMOS
90nm. Il assure 45dB de réjection jusqu’à 100MHz avec
seulement 47nF de capacité de découplage.
Références
[1] M. Camus, "Architecture de réception RF très faible coût et
très faible puissance. Application aux réseaux de capteurs et
au standard ZigBee", PhD thesis, Feb. 2008.
[2] V. Raghunathan, C. Schurgers, S. Park and M. Srivastava,
"Energy-Aware Wireless Microsensor Networks", IEEE
Signal Processing magazine (March 2002) pp. 40-50.
[3] A. Sinha and A. Chandrakasan, "Dynamic Power
Management in Wireless Sensor Networks", IEEE Design &
Test of Computers (2001) pp. 62-74.
[4] A. Liscidini, M. Tedeschi and R. Castello, "A 2.4GHz
3.6mW 0.35um quadrature front-end RX for ZigBee and
WPAN applications", IEEE ISSCC (2008) pp. 370-371.
[5] R. Van Langevelde, M. Van Elzakker and D. Van Goor, "An
Ultra Low Power 868/915MHz RF Transceiver for Wireless
Sensor Network Applications", IEEE RFIC (2009) pp. 113-
116.
[6] A. Minhas, M. Faheem and M. Azeem, "Ultra Low Power
Small Size RF Transceiver Design for Wireless Sensor
Networks", Int. Conf. on Collaboration Technologies and
Systems (2011) pp. 290-295.
[7] http://www.eda.org/verilog-ams/htmlpages/overview.html;
Accelera Verilog Analog Mixed-Signal Group.
[8] T. Coulot, E. Rouat, J.-M. Fournier, E. Lauga and F.
Hasbani, "High Power Supply Rejection (PSR) Low Drop-
out Regulator for Ultra Low Power Radiofrequency
Functions", IET Electronics Letters (2011) pp. 1117-1118.
[9] T. Coulot, E. Rouat and F. Hasbani, "Replica Compensated
High PSR LDO", French Patent submitted in June 2011.
1
/
5
100%