Oscillateur harmonique (Ex)

PCSI 2 Oscillateur harmonique
2016 – 2017 1/8
OSCILLATEUR HARMONIQUE
I Description d’un mouvement
Soit une masse attachée à un ressort et dont la position x(t) vérifie l’équation différentielle
€
˙ ˙
x (t)+
ω
0
2x(t)=
ω
0
2xeq
.
1) Dans le cas d’une masse initialement à la position
€
x0
(
€
x0>xeq
) et lâchée sans vitesse initiale, déterminer la fonction x(t).
2) Entre quelles abscisses extrémales évolue la masse ?
3) Quelle est la période du mouvement ?
4) Tracer les variations de cette fonction au cours du temps en indiquant les points remarquables.
Réponse :
€
x(t)=xeq +x0−xeq
( )
cos
ω
0t
( )
;
€
2xeq −x0≤x(t)≤x0
;
€
T0=2
π
ω
0
.
II Exploitation d’un enregistrement
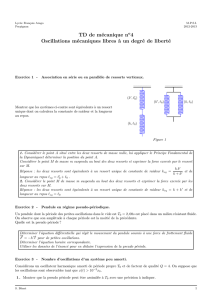
On donne ci-dessous l’enregistrement du mouvement d’un oscillateur harmonique avec x en m et t en s :
On écrit la loi horaire sous la forme
€
x(t)=Acos
ω
t+
ϕ
( )
.
Donner les valeurs numériques de l’amplitude, de la période, de la fréquence, de la pulsation et de la phase à l’origine.
Réponse : A = 3 m ; T = 2 s, f = 0,5 Hz, ω = 3,1 rad.s-1 ; ϕ = - 3π/4 rad.
III Oscillateur solide - ressort.
Le but de cette étude est de vérifier l’accord entre l’expérience et la théorie dans le cas des oscillations libres d’un système solide -
ressort horizontal.
Étude expérimentale :
Au laboratoire on filme, avec une caméra numérique, les oscillations libres d’un solide de masse m. Ce solide est attaché à deux
ressorts identiques à spires non jointives, de constantes de raideur respectives k1 et k
2, et il est posé sur un banc à coussin d’air
horizontal (figure 1).
m = 54,0 g, la masse des ressorts est négligeable ; k1 = 14,0 N.m–1 et k2 = 10,0 N.m–1.
!3#
!2#
!1#
0#
1#
2#
3#
!1# !0,5# 0# 0,5# 1# 1,5# 2# 2,5# 3# 3,5# 4#
x"
t"

PCSI 2 Oscillateur harmonique
2016 – 2017 2/8
d
B C
A
banc
caméra
(vue de dessus
à un instant de date t)
Figure 2
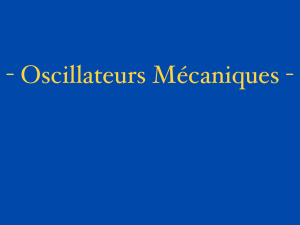
Les deux ressorts restent tendus pendant toute l’expérience. Une règle graduée horizontale est placée à la verticale au-dessus du banc.
Lorsque le système solide - ressorts est en équilibre, la soufflerie du banc étant en fonctionnement, le point A repéré sur le solide est à
la verticale du zéro de la règle graduée (figure 1). On écarte alors le solide vers la gauche et on l’abandonne sans vitesse initiale. Le
point A oscille entre les positions B et C ; on filme les oscillations (figure 2).
La fréquence d’enregistrement des images est égale à 25 images par seconde. La
caméra est placée dans le même plan horizontal que le banc, à une distance d de
celui-ci, grande devant la distance BC. Son axe optique (ou axe de visée) en
pointillés sur la figure 2 est perpendiculaire au banc et passe par A lorsque le
système est à l’équilibre.
Un logiciel approprié permet de pointer les différentes positions du point A sur
l’écran vidéo entre ses deux positions extrêmes B et C.
On commence le pointage un peu avant le premier passage du point A à la verticale
du point O et on le poursuit un peu après son troisième passage à la verticale du
point O. Le fichier de données est transféré vers un tableur qui permet de modéliser
et d’afficher la courbe x = f(t), x étant l’abscisse du point A par rapport à l’origine
O. On obtient le graphe n°1 de l’ANNEXE À RENDRE AVEC LA COPIE.
L’origine des dates t = 0 s correspond au passage du point A à la première position enregistrée.
1. Modélisation.
N.B. : La partie 1 est relativement difficile, la résolution des parties 2 à 5 peut être réalisée sans avoir traité cette première
partie.
1.1. Le problème est modélisé comme un objet ponctuel de masse m, de position G, mobile sans frottement sur un support
figuré par un axe horizontal (Oy). La masse est sollicitée par les forces de rappel élastique produites par les ressorts (R1) et (R2)
auxquels elle est reliée.
On note L la distance entre les deux points de fixations des ressorts, à chaque extrémité du banc à coussin d’air et l’on repère la
position G du mobile par la coordonnée y le long de (Oy), l’origine étant fixée au niveau du point d’attache du ressort (R1) sur le
support fixe.
Les deux ressorts sont supposés de longueur à vide identique Lo. On note k1 et k2 les constantes de raideur respectives de (R1) et
(R2).
Faire un schéma du problème.
Expliciter les forces de rappel
€
!
F
1
et
€
!
F
2
produites respectivement par chacun des ressorts en fonction des constantes de
raideur, de Lo, L et y. On notera
€
!
i
l’unitaire de l’axe (Oy).
1.2.!On! suppose! que! chacun! des! ressorts! a! ses! spires! jointives! quand! il! est! à! sa! longueur! à! vide! Lo.! Exprimer! les!
conditions! sur! y! amenant! chacun! des! ressorts! à! être! en! extension,! et! donc! à! ne! pas! se! trouver! en! situation! de! spires!
jointives.!En!déduire!une!condition!reliant!L!et!Lo.!
1.3.!Déterminer! l’expression! yéq! de! la! position! correspondant! à! l’équilibre! du! mobile.!Vérifier!cette!expression!en!
prenant!un!cas!particulier!simple.!
1.4.!Montrer!que!l’expression!de!la!force!résultant!des!actions!des!deux!ressorts!peut!se!ramener!à!la!forme!:!
€
!
F =
!
F
1+
!
F
2−kx
!
i
,!où!x!est!l’écart!à!la!position!d’équilibre!et!k!=!k1!+!k2.!
règle graduée
(vue de profil)
O
A
solide (m)
ressort 1
ressort 2
banc à coussin d'air horizontal
Figure 1

PCSI 2 Oscillateur harmonique
2016 – 2017 3/8
La suite du problème sera traitée compte tenu de cette modélisation. Le mobile est alors considéré comme soumis à la force de
rappel d’un seul ressort de raideur k.
2. Étude théorique du mouvement du solide
Dans cette étude tous les frottements sont négligés.
On peut modéliser un oscillateur mécanique horizontal par un système solide - ressort constitué d’un solide de masse m, fixé à
l’extrémité d’un seul ressort à spires non jointives, de masse négligeable et de constante de raideur k.
La position du centre d’inertie G du solide est étudiée dans un référentiel terrestre considéré comme galiléen et repérée par son
abscisse x(t) sur un axe horizontal x’Ox. L’origine des abscisses correspond à l’abscisse de G lorsque le solide est à l’équilibre.
Le solide est mis en oscillation. La période propre des oscillations est T0.
2.1. Forces exercées sur le solide en mouvement.
2.1.1. On note la force exercée par le ressort sur le solide.
Pour une position quelconque du solide, nommer les trois forces qui s’exercent sur ce solide. Les représenter au centre d’inertie
G, sans souci d’échelle, sur le schéma n°1 de l’ANNEXE À RENDRE AVEC LA COPIE.
2.1.2. En rappelant l’expression du vecteur force en fonction de l’allongement x, vérifier mathématiquement que cette force a
bien le sens attendu lorsque le centre d’inertie G se trouve à droite de la position d’équilibre sur le schéma n°1 de l’ANNEXE A
RENDRE AVEC LA COPIE.
2.2. Équation différentielle du mouvement du solide.
2.2.1. En appliquant la deuxième loi de Newton au solide, établir l’équation différentielle du mouvement de son centre d’inertie
G.
2.2.2. Sachant que la solution générale de l’équation différentielle est de la forme :
€
x(t)=Xmcos 2
π
T0
⎛
⎝
⎜
⎞
⎠
⎟
t+
ϕ
0
⎡
⎣
⎢
⎤
⎦
⎥
, montrer que
l’expression de la période propre T0 de l’oscillateur est : T0 =
€
2
π
m
k
.
2.2.3. Vérifier l’homogénéité de l’expression de la période propre T0 par une analyse dimensionnelle.
3. Retour à l’expérience
On rappelle qu’il est équivalent dans cette étude de considérer le mouvement d’un point A quelconque repéré sur le solide en
translation ou celui du centre d’inertie G du solide.
3.1. Représenter les grandeurs expérimentales T0exp et Xm,exp par des segments en trait épais sur chacun des deux axes de la
courbe x = f(t) (graphe n°1 de l’ANNEXE A RENDRE AVEC LA COPIE).
3.2. Déterminer les valeurs expérimentales de l’amplitude Xm,exp et de la période propre T0exp des oscillations du mouvement du
solide à partir du résultat de la modélisation de la courbe donnée dans l’ANNEXE À RENDRE AVEC LA COPIE. Justifier.
3.3. Les deux ressorts de constante de raideur k1 et k2 sont équivalents à un seul ressort de raideur k.
avec k = k1 + k2.
L’expression de la période propre T0 trouvée dans l’étude théorique reste valable dans le cas de deux ressorts initialement
tendus.
Calculer à partir des résultats de l’étude théorique la période propre T0 des oscillations.
3.4. Comparer les deux valeurs de la période propre en calculant l’écart relatif
(k)
G (m)
O
x(t)
E
x
x'

PCSI 2 Oscillateur harmonique
2016 – 2017 4/8
3.5. Expliquer comment vérifier numériquement la valeur proposée sur la modélisation pour la phase à l’origine c = -1,88 rad à
partir du graphe fourni.
4. Aspect énergétique en l’absence de frottements
Le système solide - ressort est toujours supposé osciller sans frottement.
Dans le modèle d’oscillateur adopté, le choix des états de référence est tel que :
• L’énergie potentielle de pesanteur est nulle à l’altitude du centre d’inertie G ;
• L’énergie potentielle élastique est nulle lorsque l’allongement du ressort est nul.
4.1. Rappeler l’expression de l’énergie mécanique Em du système solide - ressort horizontal à la position d’abscisse x
quelconque, en fonction de m, k, x et v la valeur de la vitesse du centre d’inertie G dans le référentiel terrestre.
Que peut-on dire de l’énergie mécanique Em en l’absence de frottements ?
4.2. Soit Vm la valeur maximale de la vitesse atteinte par le centre d’inertie G pour les oscillations d’amplitude Xm étudiées.
En traduisant la propriété de l’énergie mécanique donnée au 4.1., montrer que : Vm
4.3. Calculer la valeur de la vitesse maximale du mobile pour une amplitude de 4,3 cm et une période propre de 0,30 s.
4.4. En vous aidant du graphe n°1, indiquer dans les cases grisées du graphe n°2 de l’ANNEXE À RENDRE AVEC LA
COPIE :
• la durée désignée par la double flèche, en fonction de T0 ;
• Les énergies : Em, EP (énergie potentielle élastique) et EC (énergie cinétique).
5. Aspect énergétique en présence de frottements
Le système solide-ressort est toujours supposé osciller, mais désormais on tient compte des frottements.
5.1. Soit Em0 la valeur de l’énergie mécanique de l’oscillateur lâché sans vitesse initiale avec un allongement maximum initial
Xm0.
Établir l’expression de l’énergie mécanique Em0 en fonction de l’allongement maximum initial Xm0.
5.2. On constate expérimentalement qu’au bout d’une oscillation, l’amplitude du mouvement est divisée par r (nombre réel
positif non nul).
Établir l’expression du rapport de l’énergie mécanique correspondante Em1 à l’énergie mécanique initiale Em0 en fonction de r.
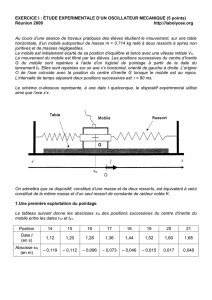
ANNEXE
La modélisation de cette courbe donne: x = a. cos(b.t + c)
avec : a= 4,25
×
10–2 m, b = 21,18 rad.s–1 et c = -1,88 rad.
t (en s)
Graphe n°1:
x (en cm)
O
x = f(t)
-1,3
4,25

PCSI 2 Oscillateur harmonique
2016 – 2017 5/8
Réponse :
€
!
F
1=−k1y−L0
( )
!
i
et
€
!
F
2= +k2L−y−L0
( )
!
i
;
€
y>L0
et
€
y<L−L0
donnent
€
L>2L0
;
€
yeq =k2L+k1−k2
( )
L0
k1+k2
;
€
˙ ˙
x +k
m
x=0
;
€
Em0=1
2
kXm0
2
;
€
Em1
Em0
=1
r2
.
IV L’oscillateur harmonique.
Le modèle de l’oscillateur harmonique permet la description de phénomènes très variés, ayant en commun une évolution périodique
d’une grandeur physique autour d’un état d’équilibre du système vers lequel celui-ci est rappelé.
Le sujet aborde sous différents points de vue diverses situations physiques mettant en jeu ce modèle.
A. Introduction du modèle.
Un solide de masse m = 100 g et de centre d’inertie G peut coulisser sans frottement le long d’une tige horizontale. Ce solide est
accroché à l’extrémité d’un ressort linéaire sans masse, l’autre extrémité du ressort étant fixée. Le ressort a une constante de
raideur k = 10 N.m-1. La direction horizontale est repérée suivant l’axe (Ox) d’unitaire 𝑢𝑥.
A l’équilibre, le centre d’inertie G du solide occupe la position O d’abscisse x = 0. On écarte le solide de sa position d’équilibre et
on le lâche. Il effectue un mouvement de translation sinusoïdal de part et d’autre de sa position d’équilibre ; le déplacement du
centre d’inertie est fonction du temps :
€
OG =x(t)!
u
x
.
A l’instant t = 0 choisi comme origine des dates, son abscisse est xo = + 2,0 cm et sa vitesse a pour valeur vo = - 0,20 m.s-1.
1. Etablir l’équation du mouvement. On précisera soigneusement toutes les étapes de la démarche.
2. Déterminer la pulsation ωo, la fréquence fo et la période To du mouvement ; expressions littérales et valeurs numériques.
(k)
G (m)
O
x(t)
E
x
x'
Schéma n°1
Graphe n°2 :
Énergie
O
t (s)
 6
7
8
6
7
8
1
/
8
100%