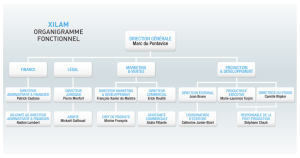
Algorithmes de décomposition de domaines pour une équation de

Algorithmes de décomposition de domaines
pour une équation de réaction-diffusion non linéaire
Filipa Caetano, Laurence Halpern
LAGA, Univ. Paris 13 - Projet SHPCO2
Collaboration : Martin Gander, Jérémie Szeftel
Groupe de travail M´
ethodes Num´
eriques - LJLL
9 février 2009
Filipa Caetano – p. 1/23

Motivation - Le projet SHPCO2
Projet de l’ANR SHPCO2 - Simulation Haute Performance du Stockage
Géologique de CO2 :
⋄Coupler différents phénomènes physiques au sein d’un même modèle :
écoulements multiphasiques, transport réactif, ...
⋄Gérer numériquement l’interaction entre zones très réactives et zones peu
réactives.
Contribution de l’équipe du LAGA :
⋄Décomposition de domaines espace-temps ;
⋄Modèles simples mais utiles ;
⋄Discrétisation des modèles.
Filipa Caetano – p. 2/23

Motivation
⋄Construction d’algorithmes de décomposition de domaines performants
pour des équations avec des termes de réaction non linéaires. Problème
modèle : équation de réaction-diffusion.
−→ Définir de bonnes conditions de transmission aux interfaces des
domaines.
⋄Découplage total en espace-temps - algorithmes de Schwarz de type
relaxation d’ondes (SWR). Objectifs :
⋄Paralléliser ;
⋄Raffiner localement en espace et en temps.
Filipa Caetano – p. 3/23

Problème modèle
L’équation de réaction-diffusion semi-linéaire :
∂tu−ν∆u+f(u) = 0.
Algorithmes de relaxation d’ondes :
⋄Décomposition du domaine spatial en sous-domaines (sans recouvrement).
⋄Résolution globale en espace-temps dans chaque sous-domaine.
⋄Couplage aux interfaces.
Objectif : Conditions à l’interface qui optimisent la vitesse de convergence de
l’algorithme.
Filipa Caetano – p. 4/23

Schwarz, SWR et SWR optimisé
⋄Algorithmes de Schwarz sans recouvrement : Lions.
⋄SWR pour des équations d’évolution :
⋄Advection-réaction-diffusion : Japhet, Nataf, Gander, Halpern, Martin,
...
⋄Saint Venant : Martin.
⋄Maxwell, Euler : Gander, Dolean, ...
⋄Schrödinger 1D : Halpern, Szeftel.
⋄Ondes semi-linéaire 1D : Halpern, Szeftel.
Filipa Caetano – p. 5/23
 6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
1
/
23
100%