dimensionner ses moteurs

DIMENSIONNER SES MOTEURS
Vousêtesici : Home > Fiches Techniques > Dimensionner ses moteurs
Comment dimensionner ses moteurs ? Couple, vitesse,
rapportderéduction,puissance...voilàundeséchantillons
decaractéristiquesquel'ontrouvedanslescatalogues...
Nous, tout ce que l'on veux c'est que nos robots avancent !
Alors lesquels choisir ? Ce petit article ne vous permettra pas
de passer professionnel dans le choix de moteurs, mais
apportequelquesbasesélémentairesessentiellesqui
permettront au roboticien amateur de passer dans la gamme
supérieure.
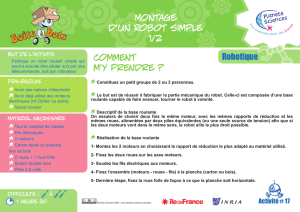
oDéfinitionsethypothèses
Toutd'abord,nouspartironsduprincipequelerobotestàrouesdifférentielles,c'estàdirequelesrouessontdans
lemêmeaxeetchacunepossèdesonpropresystèmedepropulsion.Celapermetdetournersurplaceenutilisant
lemêmeprincipequeleschars.Maisceluiquiabiencomprislesprincipesfondamentauxnedevraitpasavoirde
malàgénéraliserlescalculs.
Pourlesunitésdemesure:
lVitesse : m/s
lPoids : Kg
lDistances : m
lVitesse de rotation : tr/mn
lAccélaration:m/s²
lForce : N
lCouple : Nm
oSavoir ce que l'on veux
Etoui,avantdecommencer,ilfauttoutdemêmeavoirdéfinileprojetdanssesgrandeslignes.Pourcommencer,il
estessentieldeconnaîtrelesinformationssuivantes:
lPoids du robot : Pr
lDiamètredesroues:D
lVitesse maximale du robot : Vr
lL'accélérationmaximale:Am
lAngledelaplusgrandepenteàfranchirAp
oVitesse de rotation
PosonsRlerapportderéductionentrelemoteuretlaroue.Parexempleunréducteurde1/24diviselavitessedu
moteur par 24.
OndésireunevitessedurobotdeVr(m/s).Celavanousdonnerunevitessederotationdesroues(Vroue(tr/mn))
de :
Vroue = (Vr * 60) / (D * pie) [tr/mn]
Ensuitelerapportderéductionnousdonnetoutsimplementlavitessederotationdumoteur.
Vmoteur = (R * Vr * 60) / (D * pie ) [tr/mn]
Voilàundesprincipauxcritèrerésolu,maisrestemaintenantàdéterminerlecouple...
oDéfinitionducouple
Voilàleplusdélicatàdéterminer:lecouple.Quereprésente-t-il exactement ? Prenons un petit exemple : un couple
de 1Nm signifie que l'on peut exercer une force de 1N (100g) au bout d'une tige de 1m.
Vousl'aurezcompris,lecoupleseraenrelationaveclepoidsdurobot,c'estluiquivadéterminersilesmoteurs
serontassezpuissantspourfaireavancerlerobotouéventuellementpousserlerobotdel'adversaireencasde
collision!
Pourcalculerlecouple,nousdevonsd'abordsconnaîtrelesforcesquis'exercentsurlerobot.
lFa : c'est l'attraction terrestre, elle est directement proportionnelle au poids du robot.
lFp : c'est la projection de Fm dans l'axe du robot.
lFm:c'estlaforceexercéeparlesmoteurs.
Lorsquel'onconnaîtl'angledelapente(Ap),onendéduitfacilementlaforcenécessaireexercéeparlerobotFer:
Fp = Pr * 9,81 * sin (Ap) [N]
NousrecherchonsFmlaforceexercéeparlesmoteurs.LePrincipeFondamentaldelaDynamiquenousditquela
sommedesforcesexercéesestégaleàlamassemultipliéeparl'accélération.
Pr . Am = Fm - Fp
Fmestuneforceproduiteparlerobot,alorsqueFpestuneforceàvaincre,celaexpliquequelasommedesforces
soit Fm - Fp.Dansnotrecas,nouscherchonsàdimensionnerdesmoteurs,nousdevonsdoncnousplacerdansle
pirecasdefigure.C'estàdirel'accélérationmaximale.
Onpeutendéduirefacilementlaforceexercéeparlesmoteurs:
Fm= Pr . Am + Fp [N]
Fm = Pr. ( Am + 9,81 * sin (Ap) ) [N]
Donc maintenant le couple que devra exercer la roue est le suivant :
Croue = Fm * D / 4 [Nm]
Ladivisionpar4estdûàladivisiondudiamètre par deux, et il ne faut pas oublier que l'on a deux moteurs !
Al'entréeduréducteur,ilfautdonc:
Cmoteur = Pr . D . (Am + 9,81 * sin (Ap) ) / ( 4 . R) [Nm]
Nouspouvonsmêmeendéduirelapuissancemécaniquemaximalequelesmoteursdevrontproduire.Celleciest
égaleàlavitessemaximalemultipliéeparlaforceexercée.
Puissance = Cmoteur . Vmoteur = Vitesse . Fmoteur
Dans notre application, il y a deux moteurs, donc :
Puissance = Vr . Fm / 2 [W]
Etbienvoilà,maintenantunpetitexemple:
oExemple
Supposonsquel'ondésirefabriquerunePMIpourlacoupe,quirouleà1m/s,avecdesrouesde4cmdediamètre.
On veux que cette PMI puisse atteindre sa vitesse maximale en 2 secondes. La vitesse maximale est de 1m/s. Il
faudradoncunaccélérationde0.5m/s/s.Ilnousresteàdéfinirlapenteetlepoidsdurobot.Pourlapente,pasde
problèmelapiredespentesàunelongueurde30cmetunehauteurde10cm.L'angleestdonc:arcsin(10/30)=
19.47°.Leplusdurrestelepoidsdurobot,duràestimerlorsquelerobotn'estpasencoreconstruit!MesPMIpour
ladernièrecoupepèsent800genv,nousprendrons1kgpourêtresurdenepassetromper.Onrecherchedes
moteursoùlesrouespourrontsemontersansréducteur.
Calcul de la vitesse :
Vmoteur = ( Vr * 60 * R ) / ( D * pie ) [tr/mn]
lVr = 1m/s
lD = 0.04 m
lR = 1
Vmoteur = (1 * 1 * 60) / (0.04 * 3.14 ) = 477 tr/mn
Calcul du couple :
Cmoteur = Pr . D . (Am + 9,81 * sin (Ap) ) / ( 2 . R) [Nm]
lPr = 1 Kg
lsin (Ap) = 10/30
lD = 0.04 m
lAm = 0.5 m/s/s
Cmoteur = 0.04 * 1 * ( 0.5 + 9,81 * ( 10/30 ) ) /4 = 0.0377 Nm = 37.7 mNm
Calcul de la puissance
Puissance = Vr . Fm / 2 = Vr . Pr. ( Am + 9,81 * sin (Ap) ) / 2
Puissance = 1 * ( 0.5 + 9.81 * (10/30) ) / 2 = 1.88 Watts
Ilnefautpasoublierquelapuissancecalculéeestunepuissancemécanique,etnonunepuissanceélectrique.
Commeaucunmoteurn'aunrendementde1:1,lapuissanceconsomméeserasuppérieure.
Voilà,ilmefautdeuxmoteursquitournentà477tr/mmavecuncoupleminimumde75,4mNmetd'unepuissance
de1.88W.Jen'aiplusqu'afairemonchoixdanslesdifférentscatalogues,maintenant,cesontlesdimensionetles
puissancesconsomméesquiferontladifférence.
oQuelques liens
lDim_Mot.exe : un soft pour dimensionner ses moteurs
lMaxon : Fabricant de moteurs
lMDP:DistributeurfrançaisdesproduitsMaxons
lPortescap : Fabricant de moteurs
lMinimotor : Fabricant de moteurs
lGBM:fabricantdemoteurspasàpas(DisponiblechezE.D.)
lASTROSYN:fabricantdemoteurspasàpas(DisponibleschezE.D.
oContact
Pour toutes questions envoyer moi un mail: Sinclair ICQ# : 144345434

DIMENSIONNER SES MOTEURS
Vousêtesici : Home > Fiches Techniques > Dimensionner ses moteurs
Comment dimensionner ses moteurs ? Couple, vitesse,
rapportderéduction,puissance...voilàundeséchantillons
decaractéristiquesquel'ontrouvedanslescatalogues...
Nous, tout ce que l'on veux c'est que nos robots avancent !
Alors lesquels choisir ? Ce petit article ne vous permettra pas
de passer professionnel dans le choix de moteurs, mais
apportequelquesbasesélémentairesessentiellesqui
permettront au roboticien amateur de passer dans la gamme
supérieure.
oDéfinitionsethypothèses
Toutd'abord,nouspartironsduprincipequelerobotestàrouesdifférentielles,c'estàdirequelesrouessontdans
lemêmeaxeetchacunepossèdesonpropresystèmedepropulsion.Celapermetdetournersurplaceenutilisant
lemêmeprincipequeleschars.Maisceluiquiabiencomprislesprincipesfondamentauxnedevraitpasavoirde
malàgénéraliserlescalculs.
Pourlesunitésdemesure:
lVitesse : m/s
lPoids : Kg
lDistances : m
lVitesse de rotation : tr/mn
lAccélaration:m/s²
lForce : N
lCouple : Nm
oSavoir ce que l'on veux
Etoui,avantdecommencer,ilfauttoutdemêmeavoirdéfinileprojetdanssesgrandeslignes.Pourcommencer,il
estessentieldeconnaîtrelesinformationssuivantes:
lPoids du robot : Pr
lDiamètredesroues:D
lVitesse maximale du robot : Vr
lL'accélérationmaximale:Am
lAngledelaplusgrandepenteàfranchirAp
oVitesse de rotation
PosonsRlerapportderéductionentrelemoteuretlaroue.Parexempleunréducteurde1/24diviselavitessedu
moteur par 24.
OndésireunevitessedurobotdeVr(m/s).Celavanousdonnerunevitessederotationdesroues(Vroue(tr/mn))
de :
Vroue = (Vr * 60) / (D * pie) [tr/mn]
Ensuitelerapportderéductionnousdonnetoutsimplementlavitessederotationdumoteur.
Vmoteur = (R * Vr * 60) / (D * pie ) [tr/mn]
Voilàundesprincipauxcritèrerésolu,maisrestemaintenantàdéterminerlecouple...
oDéfinitionducouple
Voilàleplusdélicatàdéterminer:lecouple.Quereprésente-t-il exactement ? Prenons un petit exemple : un couple
de 1Nm signifie que l'on peut exercer une force de 1N (100g) au bout d'une tige de 1m.
Vousl'aurezcompris,lecoupleseraenrelationaveclepoidsdurobot,c'estluiquivadéterminersilesmoteurs
serontassezpuissantspourfaireavancerlerobotouéventuellementpousserlerobotdel'adversaireencasde
collision!
Pourcalculerlecouple,nousdevonsd'abordsconnaîtrelesforcesquis'exercentsurlerobot.
lFa : c'est l'attraction terrestre, elle est directement proportionnelle au poids du robot.
lFp : c'est la projection de Fm dans l'axe du robot.
lFm:c'estlaforceexercéeparlesmoteurs.
Lorsquel'onconnaîtl'angledelapente(Ap),onendéduitfacilementlaforcenécessaireexercéeparlerobotFer:
Fp = Pr * 9,81 * sin (Ap) [N]
NousrecherchonsFmlaforceexercéeparlesmoteurs.LePrincipeFondamentaldelaDynamiquenousditquela
sommedesforcesexercéesestégaleàlamassemultipliéeparl'accélération.
Pr . Am = Fm - Fp
Fmestuneforceproduiteparlerobot,alorsqueFpestuneforceàvaincre,celaexpliquequelasommedesforces
soit Fm - Fp.Dansnotrecas,nouscherchonsàdimensionnerdesmoteurs,nousdevonsdoncnousplacerdansle
pirecasdefigure.C'estàdirel'accélérationmaximale.
Onpeutendéduirefacilementlaforceexercéeparlesmoteurs:
Fm= Pr . Am + Fp [N]
Fm = Pr. ( Am + 9,81 * sin (Ap) ) [N]
Donc maintenant le couple que devra exercer la roue est le suivant :
Croue = Fm * D / 4 [Nm]
Ladivisionpar4estdûàladivisiondudiamètre par deux, et il ne faut pas oublier que l'on a deux moteurs !
Al'entréeduréducteur,ilfautdonc:
Cmoteur = Pr . D . (Am + 9,81 * sin (Ap) ) / ( 4 . R) [Nm]
Nouspouvonsmêmeendéduirelapuissancemécaniquemaximalequelesmoteursdevrontproduire.Celleciest
égaleàlavitessemaximalemultipliéeparlaforceexercée.
Puissance = Cmoteur . Vmoteur = Vitesse . Fmoteur
Dans notre application, il y a deux moteurs, donc :
Puissance = Vr . Fm / 2 [W]
Etbienvoilà,maintenantunpetitexemple:
oExemple
Supposonsquel'ondésirefabriquerunePMIpourlacoupe,quirouleà1m/s,avecdesrouesde4cmdediamètre.
On veux que cette PMI puisse atteindre sa vitesse maximale en 2 secondes. La vitesse maximale est de 1m/s. Il
faudradoncunaccélérationde0.5m/s/s.Ilnousresteàdéfinirlapenteetlepoidsdurobot.Pourlapente,pasde
problèmelapiredespentesàunelongueurde30cmetunehauteurde10cm.L'angleestdonc:arcsin(10/30)=
19.47°.Leplusdurrestelepoidsdurobot,duràestimerlorsquelerobotn'estpasencoreconstruit!MesPMIpour
ladernièrecoupepèsent800genv,nousprendrons1kgpourêtresurdenepassetromper.Onrecherchedes
moteursoùlesrouespourrontsemontersansréducteur.
Calcul de la vitesse :
Vmoteur = ( Vr * 60 * R ) / ( D * pie ) [tr/mn]
lVr = 1m/s
lD = 0.04 m
lR = 1
Vmoteur = (1 * 1 * 60) / (0.04 * 3.14 ) = 477 tr/mn
Calcul du couple :
Cmoteur = Pr . D . (Am + 9,81 * sin (Ap) ) / ( 2 . R) [Nm]
lPr = 1 Kg
lsin (Ap) = 10/30
lD = 0.04 m
lAm = 0.5 m/s/s
Cmoteur = 0.04 * 1 * ( 0.5 + 9,81 * ( 10/30 ) ) /4 = 0.0377 Nm = 37.7 mNm
Calcul de la puissance
Puissance = Vr . Fm / 2 = Vr . Pr. ( Am + 9,81 * sin (Ap) ) / 2
Puissance = 1 * ( 0.5 + 9.81 * (10/30) ) / 2 = 1.88 Watts
Ilnefautpasoublierquelapuissancecalculéeestunepuissancemécanique,etnonunepuissanceélectrique.
Commeaucunmoteurn'aunrendementde1:1,lapuissanceconsomméeserasuppérieure.
Voilà,ilmefautdeuxmoteursquitournentà477tr/mmavecuncoupleminimumde75,4mNmetd'unepuissance
de1.88W.Jen'aiplusqu'afairemonchoixdanslesdifférentscatalogues,maintenant,cesontlesdimensionetles
puissancesconsomméesquiferontladifférence.
oQuelques liens
lDim_Mot.exe : un soft pour dimensionner ses moteurs
lMaxon : Fabricant de moteurs
lMDP:DistributeurfrançaisdesproduitsMaxons
lPortescap : Fabricant de moteurs
lMinimotor : Fabricant de moteurs
lGBM:fabricantdemoteurspasàpas(DisponiblechezE.D.)
lASTROSYN:fabricantdemoteurspasàpas(DisponibleschezE.D.
oContact
Pour toutes questions envoyer moi un mail: Sinclair ICQ# : 144345434

DIMENSIONNER SES MOTEURS
Vousêtesici : Home > Fiches Techniques > Dimensionner ses moteurs
Comment dimensionner ses moteurs ? Couple, vitesse,
rapportderéduction,puissance...voilàundeséchantillons
decaractéristiquesquel'ontrouvedanslescatalogues...
Nous, tout ce que l'on veux c'est que nos robots avancent !
Alors lesquels choisir ? Ce petit article ne vous permettra pas
de passer professionnel dans le choix de moteurs, mais
apportequelquesbasesélémentairesessentiellesqui
permettront au roboticien amateur de passer dans la gamme
supérieure.
oDéfinitionsethypothèses
Toutd'abord,nouspartironsduprincipequelerobotestàrouesdifférentielles,c'estàdirequelesrouessontdans
lemêmeaxeetchacunepossèdesonpropresystèmedepropulsion.Celapermetdetournersurplaceenutilisant
lemêmeprincipequeleschars.Maisceluiquiabiencomprislesprincipesfondamentauxnedevraitpasavoirde
malàgénéraliserlescalculs.
Pourlesunitésdemesure:
lVitesse : m/s
lPoids : Kg
lDistances : m
lVitesse de rotation : tr/mn
lAccélaration:m/s²
lForce : N
lCouple : Nm
oSavoir ce que l'on veux
Etoui,avantdecommencer,ilfauttoutdemêmeavoirdéfinileprojetdanssesgrandeslignes.Pourcommencer,il
estessentieldeconnaîtrelesinformationssuivantes:
lPoids du robot : Pr
lDiamètredesroues:D
lVitesse maximale du robot : Vr
lL'accélérationmaximale:Am
lAngledelaplusgrandepenteàfranchirAp
oVitesse de rotation
PosonsRlerapportderéductionentrelemoteuretlaroue.Parexempleunréducteurde1/24diviselavitessedu
moteur par 24.
OndésireunevitessedurobotdeVr(m/s).Celavanousdonnerunevitessederotationdesroues(Vroue(tr/mn))
de :
Vroue = (Vr * 60) / (D * pie) [tr/mn]
Ensuitelerapportderéductionnousdonnetoutsimplementlavitessederotationdumoteur.
Vmoteur = (R * Vr * 60) / (D * pie ) [tr/mn]
Voilàundesprincipauxcritèrerésolu,maisrestemaintenantàdéterminerlecouple...
oDéfinitionducouple
Voilàleplusdélicatàdéterminer:lecouple.Quereprésente-t-il exactement ? Prenons un petit exemple : un couple
de 1Nm signifie que l'on peut exercer une force de 1N (100g) au bout d'une tige de 1m.
Vousl'aurezcompris,lecoupleseraenrelationaveclepoidsdurobot,c'estluiquivadéterminersilesmoteurs
serontassezpuissantspourfaireavancerlerobotouéventuellementpousserlerobotdel'adversaireencasde
collision!
Pourcalculerlecouple,nousdevonsd'abordsconnaîtrelesforcesquis'exercentsurlerobot.
lFa : c'est l'attraction terrestre, elle est directement proportionnelle au poids du robot.
lFp : c'est la projection de Fm dans l'axe du robot.
lFm:c'estlaforceexercéeparlesmoteurs.
Lorsquel'onconnaîtl'angledelapente(Ap),onendéduitfacilementlaforcenécessaireexercéeparlerobotFer:
Fp = Pr * 9,81 * sin (Ap) [N]
NousrecherchonsFmlaforceexercéeparlesmoteurs.LePrincipeFondamentaldelaDynamiquenousditquela
sommedesforcesexercéesestégaleàlamassemultipliéeparl'accélération.
Pr . Am = Fm - Fp
Fmestuneforceproduiteparlerobot,alorsqueFpestuneforceàvaincre,celaexpliquequelasommedesforces
soit Fm - Fp.Dansnotrecas,nouscherchonsàdimensionnerdesmoteurs,nousdevonsdoncnousplacerdansle
pirecasdefigure.C'estàdirel'accélérationmaximale.
Onpeutendéduirefacilementlaforceexercéeparlesmoteurs:
Fm= Pr . Am + Fp [N]
Fm = Pr. ( Am + 9,81 * sin (Ap) ) [N]
Donc maintenant le couple que devra exercer la roue est le suivant :
Croue = Fm * D / 4 [Nm]
Ladivisionpar4estdûàladivisiondudiamètre par deux, et il ne faut pas oublier que l'on a deux moteurs !
Al'entréeduréducteur,ilfautdonc:
Cmoteur = Pr . D . (Am + 9,81 * sin (Ap) ) / ( 4 . R) [Nm]
Nouspouvonsmêmeendéduirelapuissancemécaniquemaximalequelesmoteursdevrontproduire.Celleciest
égaleàlavitessemaximalemultipliéeparlaforceexercée.
Puissance = Cmoteur . Vmoteur = Vitesse . Fmoteur
Dans notre application, il y a deux moteurs, donc :
Puissance = Vr . Fm / 2 [W]
Etbienvoilà,maintenantunpetitexemple:
oExemple
Supposonsquel'ondésirefabriquerunePMIpourlacoupe,quirouleà1m/s,avecdesrouesde4cmdediamètre.
On veux que cette PMI puisse atteindre sa vitesse maximale en 2 secondes. La vitesse maximale est de 1m/s. Il
faudradoncunaccélérationde0.5m/s/s.Ilnousresteàdéfinirlapenteetlepoidsdurobot.Pourlapente,pasde
problèmelapiredespentesàunelongueurde30cmetunehauteurde10cm.L'angleestdonc:arcsin(10/30)=
19.47°.Leplusdurrestelepoidsdurobot,duràestimerlorsquelerobotn'estpasencoreconstruit!MesPMIpour
ladernièrecoupepèsent800genv,nousprendrons1kgpourêtresurdenepassetromper.Onrecherchedes
moteursoùlesrouespourrontsemontersansréducteur.
Calcul de la vitesse :
Vmoteur = ( Vr * 60 * R ) / ( D * pie ) [tr/mn]
lVr = 1m/s
lD = 0.04 m
lR = 1
Vmoteur = (1 * 1 * 60) / (0.04 * 3.14 ) = 477 tr/mn
Calcul du couple :
Cmoteur = Pr . D . (Am + 9,81 * sin (Ap) ) / ( 2 . R) [Nm]
lPr = 1 Kg
lsin (Ap) = 10/30
lD = 0.04 m
lAm = 0.5 m/s/s
Cmoteur = 0.04 * 1 * ( 0.5 + 9,81 * ( 10/30 ) ) /4 = 0.0377 Nm = 37.7 mNm
Calcul de la puissance
Puissance = Vr . Fm / 2 = Vr . Pr. ( Am + 9,81 * sin (Ap) ) / 2
Puissance = 1 * ( 0.5 + 9.81 * (10/30) ) / 2 = 1.88 Watts
Ilnefautpasoublierquelapuissancecalculéeestunepuissancemécanique,etnonunepuissanceélectrique.
Commeaucunmoteurn'aunrendementde1:1,lapuissanceconsomméeserasuppérieure.
Voilà,ilmefautdeuxmoteursquitournentà477tr/mmavecuncoupleminimumde75,4mNmetd'unepuissance
de1.88W.Jen'aiplusqu'afairemonchoixdanslesdifférentscatalogues,maintenant,cesontlesdimensionetles
puissancesconsomméesquiferontladifférence.
oQuelques liens
lDim_Mot.exe : un soft pour dimensionner ses moteurs
lMaxon : Fabricant de moteurs
lMDP:DistributeurfrançaisdesproduitsMaxons
lPortescap : Fabricant de moteurs
lMinimotor : Fabricant de moteurs
lGBM:fabricantdemoteurspasàpas(DisponiblechezE.D.)
lASTROSYN:fabricantdemoteurspasàpas(DisponibleschezE.D.
oContact
Pour toutes questions envoyer moi un mail: Sinclair ICQ# : 144345434
1
/
3
100%