Eléments de mécanique

Deuxième partie
Eléments de mécanique
21


Chapitre 3
ELÉMENTS DE DYNAMIQUE
Ce chapitre aurait dû figurer dans le fascicule "Introductions, rappels et complé-
ments". On peut en effet considérer qu’il est "hors programme" dans la mesure où il est
constitué principalement de rappels de connaissances supposées déjà acquises par ailleurs.
Si nous consacrons, ici, quelques pages à ces rappels, c’est en raison de l’importance des
sujets traités dont il n’est pas possible de faire l’économie. Le test d’assimilation section
4.4 renvoie aux points les plus importants du présent chapitre.
En outre, nous attirons l’attention sur le chapitre 8 (Les vecteurs )de"Introduc-
tions, rappels et compléments". La section 8.4, tout particulièrement, est supposée connue.
3.1 Le principe fondamental de la dynamique pour un point matériel
3.1.1 Définitions.
L’espace est rapporté à un référentiel orthonormé direct, R=nO;−→
i,
−→
j,
−→
ko.
La position d’un point Mdans l’espace est repéré par ses coordonnées {x, y, z}
définis par la relation
−−→
OM =x−→
i+y−→
j+z−→
k
Lorsque les coordonnées de Msont des fonctions du temps, le point Mest animé
d’un mouvement. La courbe qu’il décrit dans l’espace est sa "trajectoire".
La vitesse de Mpar rapport à Rest le vecteur −→
VM/R et son accélération le
vecteur −→
γM/R.
−→
VM/R := dx
dt −→
i+dy
dt −→
j+dz
dt −→
k
−→
γM/R := d2x
dt2−→
i+d2y
dt2−→
j+d2z
dt2−→
k
Les unités sont "le mètre par seconde" ( ms
−1)pour les vitesses et "le mètre par
seconde carré" ( ms
−2)pour les accélérations.
LorsquelerepèrenO;−→
i,
−→
j,
−→
koest fixe, le vecteur −→
VM/R est la dérivée de −−→
OM
par rapport au temps : −→
VM/R =d−−→
OM
dt .Ce n’est pas le cas si certains vecteurs de base,
−→
iet −→
j,par exemple, dépendent du temps.
Parmi l’ensemble des référentiels possibles, il en existe une classe particulière,
privilégiée parce que les lois de la dynamique y sont simples. Ces repères sont appelés
"repères galiléens ". C’est généralement un repère galiléen que l’on considère comme un
repère fixe.

24 Eléments de dynamique
3.1.2 Composition des vitesses.
Considérons un repère fixe, R, et un second repère R0dont l’origine O0est en
mouvement par rapport à R. Pour simplifier, supposons que les axes restent parallèles à
ceux de R:R0=nO0;−→
i,
−→
j,
−→
ko.
Posons −−−→
O0M=x0−→
i+y0−→
j+z0−→
k.
Les coordonnées de Mpar rapport à R0sont {x0,y
0,z
0}.
La vitesse de Mpar rapport à R0est −→
VM/R0:= dx0
dt −→
i+dy0
dt −→
j+dz0
dt −→
k. Nous notons
−→
VR0/R,la vitesse de O0par rapport à R. En dérivant la relation −−→
OM =−−→
OO0+−−−→
O0Mpar
rapport au temps on obtient −→
VM/R =−→
VO0/R +−→
VM/R0ce que l’on note sous la forme
−→
VM/R =−→
VM/R0+−→
VR0/R
Cette expression est la loi de composition des vitesses.
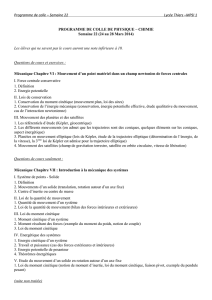
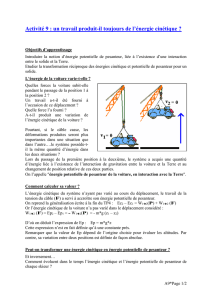
Exemple. Un observateur terrestre, R, regarde un avion, M, porté par un vent de
vitesse v0−→
i.Soit R0le référentiel emporté par le vent, −→
vR0/R =v0−→
i. Par rapport à l’air
qui le porte, l’avion se déplace avec la vitesse −→
vM/R0=w−→
u(voir la figure ci-dessous).
fig. 3.1 : Composition des vitesses.
Relativement à l’observateur terrestre la vitesse de l’avion est −→
vM/R telle que
−→
vM/R =w−→
u+v0−→
i.L’avion semble se déplacer "en crabe". C’est très sensible par un
vent de travers, avec de petits avions dont la vitesse n’est pas trop grande par rapport à
celle du vent.
Lorsque −→
u=−→
i,le problème est un problème à une dimension. Dans ce cas on
trouve −→
vM/R =v−→
iavec v=v0+w. Si les deux vitesses −→
vR0/R et −→
vM/R0sont de
même sens, celui de −→
ipar exemple, il vient v0>0,w>0et v=|w|+|v0|,les vitesses
s’additionnent. Par contre, lorsque les vitesses sont de sens contraires, pour v0<0et
w>0par exemple, on trouve v=|w|−|v0|,les vitesses se soustraient.
Dans la suite du cours, nous utiliserons un repère galiléen, R, choisi une fois pour
toutes. Nous considérons ce repère comme un repère fixe et nous abandonnons l’expression
"par rapport à R" pour désigner la vitesse et l’accélération d’un mobile ; de même nous
écrirons −→
vet non plus −→
v/R.
3.1.3 Le principe fondamental de la dynamique.
Le principe fondamental de la dynamique postule l’existence de repères
privilégiés, appelés "repères galiléens", où toute masse ponctuelle m, soumise à une force
−→
Fest animée d’une accélération −→
γtelle que
−→
F=m−→
γ(3.1)

Lessystèmesdepointsmatériels 25
Etant donné un repère galiléen R, cette propriété permet de démontrer que sont
galiléens les repères dont l’origine est animée d’une vitesse constante par rapport à Ret
dont les axes restent parallèles à une direction fixe.
On déduit du principe fondamental qu’un point matériel immobile n’est soumis
à aucune force et qu’un point matériel qui n’est soumis à aucune force est animé d’une
vitesse constante car −→
γ=−→
0⇔−→
V=−→
cte.
3.2 Les systèmes de points matériels
3.2.1 Lecentred’inertied’unsystèmedepointsmatériels.
Considérons maintenant un ensemble quelconque de points matériels, un solide ou
un nuage. Les points sont notés Mket leur masse mk.On définit "le centre de masse",
G, de ce système comme le barycentre des divers points matériels affectés de leur masse
comme coefficient :
−−→
OG := 1
MP
k
mk−−→
OMkavec M:= X
k
mk(3.2)
Mest la masse totale du système. Rappelons que la relation précédente implique
P
k
mk−−→
GMk=−→
0
Le centre de masse d’un système de points matériels est encore appelé "centre
d’inertie". C’est en ce point que s’applique la résultante des forces de pesanteur lorsque
le système est soumis à un champ de gravité uniforme ; pour cette raison Gest parfois
appelé "centre de gravité".
3.2.2 Forces intérieures et extérieures au système.
Etant donné un ensemble de points matériels, nous en isolons par la pensée un
sous-ensemble, baptisé "système". Sur chaque point matériel s’exerce des forces. On dis-
tingue les "forces intérieures"et les "forces extérieures"au système.
Une force intérieure, −→
ϕk,est celle qu’exerce une partie du système lui-même, sur
le point Mk.Considérons les points Miet Mkdu système, de masse miet mk.Laforce
d’attraction gravitationnelle qu’exerce la masse mi(avec i6=k)sur la masse mkest une
force intérieure au système. De même l’attraction gravitationnelle qu’exerce mksur mi
est aussi une force intérieure au système. Si la masse mkfrotte sur la masse mj,les forces
de frottement de mjsur mket de mksur mjsont des forces intérieures au système.
La notion de force intérieure dépend crucialement de la définition donnée au
système, or cette définition est toujours posée par le physicien ; elle constitue une façon
de concevoir l’Univers. Il est donc très important de préciser quel est le système considéré
(cf. fig. 3.2).
 6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
1
/
38
100%