TD de mécanique du point

TD de mécanique du point
Série 2
Exercice 1 :
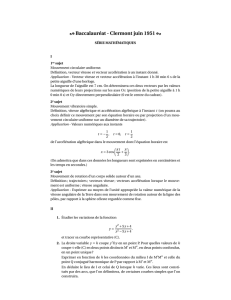
Soit M un point d’un cercle de rayon R, roulant sans glisser sur une droite.
Cela correspond à la superposition d’une translation uniforme du centre du cercle, noté C, à la
vitesse V, et d’un mouvement de rotation uniforme du cercle autour de son axe, à la vitesse
angulaire ω de manière à ce que le point de contact du cercle avec la droite ait toujours une
vitesse nulle.
1) Etablir les lois horaires de ce mouvement :
),(tMO
)(
0MVR
et
)(
0M
R
,
2) Quelle particularité possède le vecteur accélération.
y
O
Exercice 2 :
Un point M est situé dan un référentiel fixe R0 par ses coordonnées cylindriques (ρ,θ,z) :
ρ = R, θ = ωt et z = hθ (R et ω sont des constantes positives et t est le temps). )
1) Ecrire le vecteur position
MO
en coordonnées cartésiennes,
2) Quel est le mouvement du point M dans le plan xOy ? Quel est le mouvement du point M
suivant la direction de l’axe Oz ? Quel est le mouvement résultant du point M ?
3) Déterminer les composantes cartésiennes et les modules des vecteurs vitesse et accélération
du point M.
4) Calculer l’abscisse curviligne s(t) du point M sachant qu’à l’instant t = 0, s(t) = 0.
5) Quelles sont les composantes tangentielle et normale du vecteur accélération du point M ?
6) Calculer le rayon de courbure RC de la trajectoire de M.
7) Montrer que la vitesse fait un angle constant α avec l’axe Oz.
8) Quelles sont les coordonnées cylindriques du mouvement du point M ?
9) Déterminer les vecteurs de la base de Frenet.
10) Montrer que le pas d’hélice Ph = 2πλ = 2πRtgα.
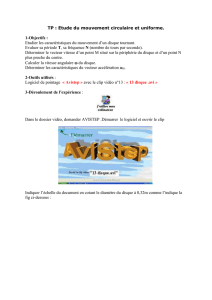
Exercice 3 :
Dans le plan Oxy , un cercle de rayon R , de diamètre OA , tourne à la vitesse angulaire
constante ω autour du point O . On lie à son centre mobile O1 deux axes rectangulaires O1x1y1
(l’axe O1x1 est dirigé suivant OA ) (figure 2).
A l’instant t = 0 , A est sur Ox , Ox et O1x1 étant alors colinéaires.
Un point M , initialement en A , parcourt la circonférence dans le sens positif avec la même
vitesse angulaire ω .
1) Calculer directement les composantes des vecteurs vitesse et accélération de M dans le repère
Oxy (en dérivant les composantes de
MO
).
2) Calculer les composantes de la vitesse et de l’accélération relatives de M dans le repère
O1x1y1.
Université Abdelmalek Essaadi 2013-2014
FPL
Larache A.Ghacham Amrani
M
θ
C Figure 1
I x

3) a) Calculer les composantes de la vitesse d’entraînement dans le repère Oxy en utilisant
la notion de point coïncidant, retrouver le résultat par la loi de composition des vitesses.
b) Calculer de même les composantes de l’accélération d’entraînement dans le repère Oxy ;
en déduire l’accélération complémentaire.
4) Vérifier les expressions des composantes de la vitesse d’entraînement et celle de l’accélération
complémentaire en utilisant les expressions faisant intervenir le vecteur instantané de
rotation
)/( 1RR
..
Exercice 4 :
Soit un système (Figure 3) composé de deux tiges : la première de longueur L est en rotation de
centre O0 relativement au référentiel galiléen R0 qualifié d’absolu, la seconde tige de longueur D
est en rotation de centre O1 relativement à la première tige.
A- On s’intéresse au mouvement de la tige (2) relativement à un référentiel R1 lié à la tige (1).
On travaillera dans le repère R1
),,,( 1111 kjio
. L’angle ψ évolue de manière quelconque.
1) En se plaçant en coordonnées polaires dans le référentiel R1, donner la position, la vitesse
et l’accélération du point M (l’autre extrémité de la tige 2).
2) Donner en coordonnées cartésiennes, les vecteurs position, vitesse, accélération du point M
relativement au référentiel R1.
B- On se place maintenant dans le référentiel R0. L’angle θ évolue de manière quelconque.
Tous les résultats seront donnés en coordonnées cartésiennes en projection sur la base
),,( 111 kji
3) Exprimer le vecteur
)/( 01 RR
,
4) Déterminer la vitesses et l’accélération absolue du point M .
C- On se place dans le cas particulier pour lequel l’angle
tt
)(
et l’angle
tt
)(
.
5) Donner l’équation du mouvement de M par rapport au temps dans R0,
6) Quel est le lieu de M au cours du temps ? Dessinez-le sur un schéma.
y
y1 M x1
A
θ
O1
O θ x
Figure2
0
j
1
j
M
ψ
1
i
O1
O0 θ
0
i
Figure3
1
/
2
100%