TP Mécanique 4 : LE GYROSCOPE

TP Mécanique 4 : LE GYROSCOPE
B. AMANA et J.-L. LEMAIRE

Gyroscope
LE GYROSCOPE
PARTIE THEORIQUE
Cette partie rappelle les différentes notions théoriques nécessaires à la
compréhension du mouvement du gyroscope.
I Eléments cinétiques d’un solide.
I-1 Centre de masse et quantité de mouvement.
Soit (S) un solide et (R
s
) un référentiel lié à (S). Le volume élémentaire dτ autour d’un
point fixe P de (R
s
) contient la masse dm = ρ(P)dτ où ρ(P) est la masse volumique du
solide. Le point G
s
de (R
s
) est le centre de masse du solide (S) si :
0)(
)(
ϖ
=
∫∫∫
Ss
dPPG
τρ
(1)
Soit (R) le référentiel du laboratoire . Si le point P de (R
s
) a une position M dans (R )
et si la position G
s
dans (R
s
) est G dans (R) on a alors :
PGGM
s
=
. Soit en
remplaçant dans l’équation (1),
0)(
)(
ϖ
=
∫∫∫
S
dPGM
τρ
(2)
Les points M et G de (R ) étant mobiles, le vecteur
GM
dépend du temps.
2
v(G)v(M)
dt
GMd
dt
OGd
dt
OMd
dt
GMd
−=
−=
O
(R)
(Rs)
Os
(S)

Gyroscope
En dérivant (2) par rapport au temps, on obtient :
0(P)d](G)v(M)[v
)(
=τρ−
∫∫∫
s
∫∫∫ τρ=
∫∫∫ τρ⇒
(s) (P)dv(G)
(s) (P)dv(M)
En faisant apparaître la masse m=
τρ
dP
S
)(
)(
∫∫∫
et sa quantité de mouvement
∫∫∫
=
)(
)(v(M)p
S
dP
τρ
, on peut écrire :
(3) v(G)mp
=
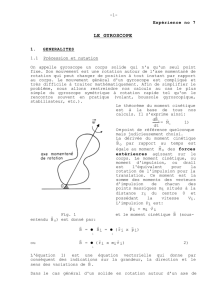
I-2 Moment cinétique d’un solide en rotation autour d’un point fixe
.
Un solide est en rotation autour d’un point fixe O si l’un des ses points O
s
a pour
position O dans l’espace (R ) quel que soit le temps.
Soit
Ω
le vecteur rotation du solide, un point P de (R
s
) de position M dans (R ) a
pour vitesse
OMv(M)
∧Ω=
.
Le moment cinétique
L
en O est défini par :
)(
OL
=
∫∫∫
∧
)(
v(M)OM
S
dm
Ou encore :
∫∫∫
∧=
)(
)(OM)(
S
PdpOL
(4)
Comme dm =
τ
ρ
d
(P)
et
OM
=
PO
s
, il vient :
τρ
dPPOPOOL
s
ss
)()()(
)(
∧Ω∧=
∫∫∫
(5).
L’expression précédente peut être présentée sous une forme matricielle. En
choisissant une base (
kji
,,
) liée au solide pour
Ω
ω
ω
ω
z
y
x
et
L
( les axes
correspondant étant O
s
x, O
s
y, O
s
z) on peut écrire :
Page 3

Gyroscope
ω
ω
ω
−− −− −−
=
z
y
x
zzzyzx
yzyyyx
xzxy
JJJ
JJJ
JJJ
L
L
L
.
xx
z
y
x
ou encore
Ω=
).()(
s
OJOL
(6)
où L (O) et
Ω
sont des matrices uni-colonnes et J(O
s
) une matrice de dimension 3x3.
J(O
s
) est appelée matrice d’inertie. Il est très important de faire remarquer que
L
(O)
est le vecteur moment cinétique en O pour le mouvement de (S)
par rapport au
référentiel (R
) et dont nous avons donné les composantes sur la base (
kji
,,
) liée
au solide donc mobile par rapport à (R).
Si x, y, z sont les coordonnées de P,
∫∫∫
τρ+=
)(
22
),,()(
S
xx
dzyxzyJ
∫∫∫
τρ=
)(
),,(
S
yx
dzyxyxJ
∫∫∫
τρ=
)(
),,(
S
zx
dzyxzxJ
On obtient les autres termes de la matrice par permutation circulaire. Les termes de
la diagonale principale sont les moments d’inertie par rapport aux axes O
s
x, O
s
y, O
s
z,
les autres étant les produits d’inertie.
La matrice J(O) étant diagonalisable, il existe une base orthonormée (
321
e ,e ,e
)
dans laquelle J(O)=
3
2
00
00
00
1
J
J
J
.
J
1
, J
2
et J
3
sont les moments d’inertie principaux. Pour les solides de forme
particulière les axes principaux sont souvent évidents par l’étude des symétries du
problème.
Soient
∆
un axe passant par le centre d’inertie G d’un solide,
∆
’ une axe parallèle à
∆
et d la distance entre
∆
et
∆
’ ; soient J
∆
et J
∆’
respectivement les moments d’inerties
par rapport
∆
et
∆
’. On montre que (
Théorème d’Huyghens
) :
2
'
mdJJ
+=
∆∆
(7)
I-3 Théorème du moment cinétique.
En reprenant la relation (4)
∫∫∫
∧=
)(
)(OM)(
S
PpdOL
,
on peut écrire :
)(OM)((
)(
Pp
dt
d
OL
dt
d
S
∫∫∫
∧=
;
4

Gyroscope
or
(P)f
dt
pd
ext
=
(principe fondamental de la dynamique) où
(P)f
ext
est la somme des
forces extérieures qui s’exercent sur le point P.
D’où :
∫∫∫
∧=
)(
)(OM))((
Sext
PfOL
dt
d
.
)(OM
)(
Pf
ext
S
∫∫∫
∧
représente par définition la somme des moments en O
)(
OM
E
des
forces extérieures qui s’exercent sur le solide (S). Il s’ensuit que
)())((
OMOL
dt
d
E
=
(8).
II Rotation d’un solide de révolution autour d’un point fixe
.
II-1 Matrice d’inertie
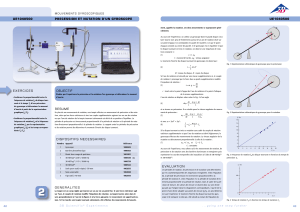
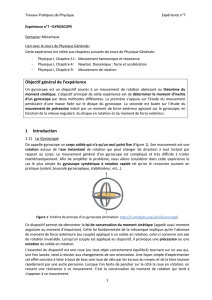
Soit (S) un solide pour lequel l’on fait les hypothèses suivantes :
- (S) a une forme géométrique de révolution autour de l’axe Oz
1
(voir figure suivante)
- La masse volumique en un point z
1
ne dépend que de la distance de ce point à
l’axe Oz
1
.
y
x
z
O
i
j
k
(S)
1
1
1
1
1
1
Figure 1.
Il résulte de ces deux hypothèses les conséquences suivantes :
-
le centre de masse G du solide est sur l’axe de révolution,
-
l’axe Oz
1
et tout couple d’axes Ox
1
et Oy
1
perpendiculaires entre eux et à Oz
1
forment les axes principaux d’inertie en O du solide.
Page 5
 6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
1
/
20
100%