r ∑ r - UniNE

-1-
Expérience no 7
LE GYROSCOPE
1.
GENERALITES
1.1
Précession
et
nutation
On appelle gyroscope un corps solide qui n'a qu'un seul point
fixe. Son mouvement est une rotation autour de l'axe momentané de
rotation qui peut changer de position à tout instant par rapport
au corps. Le mouvement général d'un gyroscope est compliqué et
très difficile à traiter mathématiquement. Afin de simplifier le
problème, nous allons restreindre nos calculs au cas le plus
simple du gyroscope symétrique à rotation rapide tel qu'on le
rencontre souvent en pratique (volant, boussole gyroscopique,
stabilisateur, etc.). Le théorème du moment cinétique
est à la base de tous nos
calculs. Il s'exprime ainsi:
dr
B
o
dt
=
r
M
o
1)
O
≡
point de référence quelconque
mais judicieusement choisi.
La dérivée du moment cinétique
r
B
o par rapport au temps est
égale au moment
r
M
o des forces
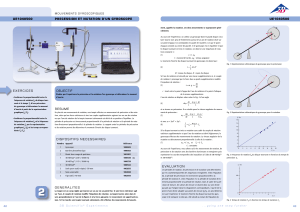
extérieures agissant sur le
corps. Le moment cinétique, ou
moment d'impulsion, ou drall
est l'équivalent pour la
rotation de l'impulsion pour la
translation. Ce moment est la
somme des moments des vecteurs
d'impulsion de chacun des
points massiques mi situés à la
distance ri du centre 0 et
possédant la vitesse Vi.
L'impulsion Pi est:
r
p
i = mi
r
v
i
Fig. 1 et le moment cinétique
r
B
(sous-
entendu
r
B
o) est donné par:
r
B
=
r
B
i
∑
i =
(
i
∑
r
r
i x
r
p
i)
ou
r
B
=
(
i
∑
r
r
i x mi
r
v
i) 2)
L'équation 1) est une équation vectorielle qui donne par
conséquent des indications sur la grandeur, la direction et le
sens des variations de
r
B
.
Dans le cas général d'un solide en rotation autour d'un axe de

-2-
rotation
r
u
(
r
u
=
r
ω
/
ω
) quelconque, il faut remarquer que le moment
cinétique
r
B
et l'axe momentané de rotation
r
ω
ne sont pas
parallèles. La relation entre ces deux grandeurs se trouve de la
façon suivante:
r
B
=
mi(
i
∑
r
r
i x
r
v
i) avec
r
v
i =
r
ω
x
r
r
i = ω(
r
u
x
r
r
i)
donc
r
B
= ω
mi(
i
∑
r
r
i x (
r
u
x
r
r
i)) = ω
mi(
i
∑
r
u
ri2 -
r
r
i(
r
u
·
r
r
i))
r
B
=
r
ω
∑ mi ri2 - ∑ mi
r
r
i(
r
u
·
r
r
i)
On voit qu'en général
r
B
et
r
ω
ne sont pas parallèles. La
composante de
r
B
suivant l'axe de rotation
r
u
sera:
r
B
·
r
u
= Bu = ω ∑ mi(ri2 -(
r
u
·
r
r
i)2) = ω ∑ mi δ2
≡
ωθu
θu est le moment d'inertie par
rapport à l'axe
r
u
.
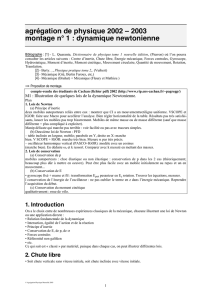
Si l'axe de rotation coïncide avec
un axe de symétrie du solide, B
est parallèle à u et on peut
écrire:
r
B
= θ
r
ω
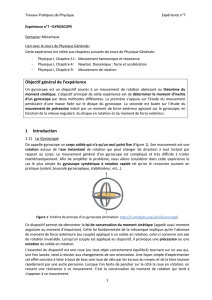
Fig. 2 La figure 3 représente une toupie
pointue T qui tourne rapidement
autour de l'axe momentané de
rotation supposé identique à l'axe
de la toupie. Au temps t le moment
cinétique aura la valeur
r
B
. La
toupie étant penchée, son poids
r
P
agissant au centre de gravité G
produira un moment
r
M
par rapport
au point 0. D'après 1) qu'on peut
aussi écrire:
d
r
B
= dt
r
M
l'accroissement du moment ciné-
tique d
r
B
est parallèle au moment
r
M
. Au temps t + dt donc, le
moment cinétique, l'axe ,de la
toupie avec lui et le moment
r
M
occuperont de nouvelles positions
indiquées en
r
B
+ d
r
B
et
r
M
+ d
r
M
.
Si la force
r
P
agit constamment,
l'axe de la toupie changera autour
de la verticale passant par 0 et
effectuera ce qu'on appelle une
précession
.
Fig. 3

-3-
Si le moment cinétique n'est pas confondu avec l'axe de symétrie
du corps (aussi axe de rotation rapide), la toupie effectuera un
troisième mouvement de rotation superposé à la précession: la
nutation.
On la mettra le mieux en évidence expérimentalement en
supprimant le moment M: c'est le cas du
gyroscope
supporté
en
son
centre
de
gravité.
r
M
= 0 donc
dr
B
dt
= 0
Le moment cinétique
r
B
reste en place et l'axe de rotation rapide,
s'il n'est pas confondu avec
r
B
, tourne autour de
r
B
.
Le moment cinétique
r
B
est fixe dans l'espace. L'axe de rotation
rapide décrit un cône qui a
r
B
pour axe, le cône de nutation. Ce
mouvement est facile à observer: il suffit de donner un choc à un
gyroscope rapide pour faire que le moment cinétique ne coïncide
plus avec l'axe du corps qui décrit alors un cône de nutation.
1.2
Précession d'un gyroscope symétrique pesant à rotation rapide
Lorsqu'un gyroscope est soumis à un moment dû à son poids
(déséquilibre du point d'appui) son mouvement est plus complexe et
présente une précession caractéristique. Ce mouvement est
relativement
simple,
uniquement
si
l'axe
de
rotation
coïncide
avec
l'axe
de
symétrie
du
corps
et si la rotation est rapide.
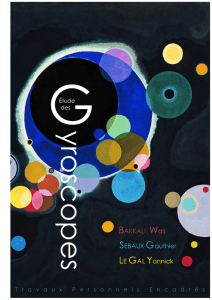
Fig. 4 Fig. 5
Considérons le gyroscope suivant (Fig. 4): un disque (D) est fixé
à un moteur (ME) supporté par une barre (B) de telle façon que
l'axe du gyroscope coïncide avec celui de la barre. Cette barre
est fixée en 0 à un palier qui permet une rotation autour d'une
verticale et d'une horizontale, en d'autres termes, un mouvement
quelconque autour de 0. Un contrepoids C permet d'équilibrer le
système. Le gyroscope formé par le disque tourne autour de son axe
avec la vitesse angulaire
r
ω
.
r
B
est alors, par suite de la
symétrie, dans la direction de l'axe du corps en rotation.
Tant que le gyroscope (Fig. 4) est bien équilibré
r
M
= 0, et à
cause de 1) d
r
B
/dt = 0
r
B
= constante
Le moment cinétique est fixe dans l'espace et dans le temps.
Suspendons un poids mg à l'extrémité libre de la barre, il en
résultera un moment M par rapport au point fixe 0. B augmentera de
dB = M dt et le gyroscope effectue une précession. La vitesse
angulaire Ω de cette précession vaut: Ω = dα/dt, où dα est
l'angle, dans le plan horizontal, dont a tourné l'axe du gyroscope

-4-
pendant le temps dt. De la figure 5, on tire:
dα =
arc
rayon
=
dB
B
mais dB = M dt et dα = M dt/B donc Ω = M/B. D'autre part, M = mg
l
et B = θω, par conséquent:
Ω =
gl
θm
ω
(3)
La précession est donc d'autant plus rapide que le moment ciné-
tique est faible, c'est-à-dire, pour un θ donné, que la vitesse
angulaire est petite et que le moment M est grand
1.3
Détermination
du
moment
d'inertie
On fixe une masse m sur le disque du gyroscope (Fig. 6) et on
détermine la période T du pendule physique ainsi formé. (Enlever
les charbons du moteur pour diminuer la friction).
On a: T = 2π
θ + mL2+ ′ θ
mgL
(Comparer introduction pendule)
θ' = (m/2) r2
et on en tire facilement:
Fig. 6
θ = m(
T2gL
4π2
- L2 -
r2
2
) (4)
Signification
des
symboles
:
T = période du pendule physique (disque + masse m) [s]
θ = moment d'inertie du volant seul [kg m2]
θ'= moment d'inertie de m par rapport à l'axe passant par son
centre de gravité [kg m2]
m = masse additionnelle [kg]
L = distance centre de gravité de m à l'axe de rotation [m]
g = 9,81 m s-2
r = rayon de la masse additionnelle [m]

-5-
2.
EXERCICES
1. Déterminer le moment d'inertie θ du gyroscope selon la méthode
décrite sous 1.3. (équ. 4).
2. Mesurer les vitesses de précession pour différentes vitesses de
rotation propre de la roue et pour différents poids
additionnels. Faire l'expérience avec 5 poids additionnels et 4
différentes fréquences de rotation de la roue (f en cycles).
Faire la représentation graphique Ω = Ω(
m
ω
); de la pente tirer
θ (équ. 3) et comparer ce résultat à celui obtenu à partir de
l'équation (4).
Vitesse
de
précession
Mettre le gyroscope en rotation et le poser sur son palier à air
(pression au mano. détendeur: 4kg); l'équilibrer exactement en
déplaçant le contrepoids de manière à n'observer aucune
précession. Puis produire un moment en suspendant un poids
supplémentaire à la barre (sous le contrepoids). Le choc
introduira en général une certaine nutation qu'on peut éviter en
accrochant délicatement le poids, ou qu'on peut compenser en
poussant de la main au départ le gyroscope dans son mouvement de
précession (explication!). Ceci est nécessaire parce que dans nos
calculs de Ω, nous avons supposé le mouvement établi et
stationnaire, nous ne nous sommes pas occupés des conditions
initiales et transitoires.
Mesure de la vitesse de rotation avec le stroboscope:
Faire vibrer le stroboscope à une fréquence supérieure à la
vitesse maximum prévisible (dans les système mécanique simple 4000
tours/min est déjà considérable) puis baisser cette fréquence
jusqu'à observer l'image stable du disque. Cette fréquence de
stabilisation est égale au nombre de tours/ min. D'autres
fréquences plus faibles correspondront à deux tours, trois tours
etc. entre deux éclats de la lampe stroboscopique.
3. Se convaincre de la justesse de la relation vectorielle entre
r
B
et
r
M
.
5 août 2002_nd
1
/
5
100%