9 - SEW-EURODRIVE

184 MOT2 – Servomoteurs synchrones
8Description des freins BP
Freins BP
MOT2
8Freins BP
8.1 Description des freins BP
Frein de maintien
BP
Le frein mécanique est un frein de maintien à action de ressort.
Le frein est alimenté par une tension continue DC 24 V et travaille avec un ou deux
couple(s) de freinage selon la taille du moteur ; combinaisons, voir page 193.
Le frein ne peut être monté ultérieurement et fonctionne en règle générale sans redres-
seur ou commande de frein.
Dès lors que les servomoteurs sont pilotés par des servovariateurs MOVIAXIS®, leur
protection contre les surtensions réseau est assurée.
Si les servomoteurs sont pilotés par des MOVIDRIVE® ou des variateurs d’autres fabri-
cants, une protection contre les surtensions réseau, par exemple des varistors, doit être
réalisée par le client.
Respecter les indications concernant la procédure de commande du moteur et du frein
contenue dans les notices d’exploitation pour variateurs correspondantes.
En fonction de la taille de moteur, le frein BP peut être utilisé avec les vitesses de réfé-
rence suivantes.
Type de moteur Type de frein Classe de vitesse
CMP40S/M BP01
3000 / 4500 / 6000CMP50S/M/L BP04
CMP63S/M/L BP09
CMP71S/M/L BP1 2000 / 3000 / 4500 / 6000
CMP80S/M/L BP3 2000 / 3000 / 4500
CMP100S/M/L BP5

MOT2 – Servomoteurs synchrones 185
8
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
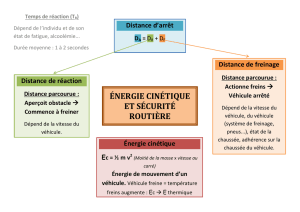
Le principe de fonctionnement des freins BP
Freins BP
8.2 Le principe de fonctionnement des freins BP
Structure générale
Le frein SEW est un frein à disque à alimentation en courant continu. Il se débloque par
voie électromagnétique et retombe par action de ressorts.
Le principe du système satisfait à l’exigence fondamentale de sécurité qui veut qu’en
cas de coupure de courant, le frein retombe automatiquement.
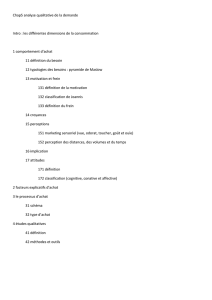
Structure générale du frein à action de ressort 24 V
55832AXX
[1] Moyeu d’entraînement [2] Frein complet
[1] [2]

186 MOT2 – Servomoteurs synchrones
8Le principe de fonctionnement des freins BP
Freins BP
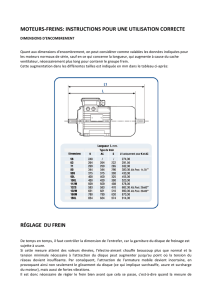
Le fonctionnement
Lorsque l’électro-aimant n’est pas sous tension, les ressorts de frein plaquent le disque
de freinage contre le porte-garnitures. Le moteur est freiné, le couple de freinage étant
déterminé par le nombre et le type de ressorts. Lorsque la tension continue adéquate
est appliquée à la bobine de frein, il est possible de vaincre la poussée [11] des ressorts
[4] et d’attirer le disque contre le corps magnétique, de manière à libérer le porte-
garnitures et à permettre au rotor de tourner.
56912AXX
[1] Porte-garnitures
[2] Flasque-frein
[3] Moyeu d’entraînement
[4] Action des ressorts
[5] Entrefer
[6] Disque de freinage
[7] Ressort de frein
[8] Bobine de frein
[9] Corps magnétique
[10] Arbre moteur
[11] Force électromagnétique
[5]
[11]
[10]
[9]
[8]
[7]
[6]
[3]
[2]
[1]
[4]

MOT2 – Servomoteurs synchrones 187
8
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
Remarques générales
Freins BP
8.3 Remarques générales
Pour obtenir une durée de vie la plus longue possible, tant le moteur-frein que les
liaisons électriques doivent être dimensionnés et sélectionnés soigneusement.
Pour cela, il faut tenir compte des points suivants détailles ci-après.
1. Choix du couple de freinage d’après les résultats de détermination, voir page 187.
2. Dimensionnement et pose des câbles, voir page 188.
3. Si besoin, sélection du contacteur-frein, voir page 188.
4. Indications importantes pour la construction, voir page 189.
8.4 Choix du frein d’après les résultats de détermination
Le couple de freinage est à définir au moment de la détermination du moteur. Le type
d’entraînement et les conditions d’utilisation ainsi que les normes en vigueur influencent
également le type de frein possible.
Les critères de sélection sont :
• Servomoteur
• Valeur du couple de freinage ("freinage doux" / "freinage brutal")
Choix du frein
Le type de frein est fonction du couple de freinage. Les combinaisons moteur - type de
frein - couple de freinage sont données page 193.
Capacité de travail en cas d’ARRET D’URGENCE
Capacité de travail en cas d’ARRET D’URGENCE
Couple de freinage pour applications de levage
Les freins BP ne sont pas adaptés pour les applications de levage.
Pour des couples de freinage et un travail de frein plus élevés, voir les freins BY, page
196 et suivantes
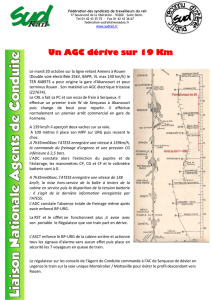
60958AFR
Z = nombre de freinages
Wtot = travail total du frein en J
W1= travail du frein par cycle de freinage en J
Jtot = moment d’inertie total des masses (rapporté à l’arbre moteur) en kgm2
n = vitesse moteur en tr/min
MB= couple de freinage en Nm
ML= couple de charge [Nm] (attention au signe)
+ : en cas de montée verticale et de mouvement horizontal
- : en cas de descente verticale
W1 =
Jges n2 MB
182.4 (MB - ML)
+
x x
x

188 MOT2 – Servomoteurs synchrones
8Dimensionnement et pose des câbles
Freins BP
8.5 Dimensionnement et pose des câbles
a) Dimensionnement des câbles
Choisir la section du câble de frein en fonction des courants de l’application. Lors du
choix des câbles, tenir compte du courant d’appel du frein. S’assurer que la chute de
tension provoquée par le courant d’appel n’est pas inférieure à 90 % de la tension ré-
seau. Les caractéristiques des freins donnent les tensions de raccordement possibles
et les courants d’utilisation correspondants.
Le dimensionnement des sections et des longueurs de câbles est présenté au chapitre
"Tableaux des combinaisons câbles - servomoteurs CMP", page 205 et suivantes.
Les bornes des commandes de frein tolèrent des sections de câble de 2,5 mm2
maximum. Pour des sections plus importantes, prévoir des bornes
intermédiaires.
b) Remarques pour la pose des câbles
L’alimentation des freins doit toujours être séparée de celle des moteurs pour évi-
ter des courants parasites si les câbles ne sont pas blindés.
De manière générale, assurer une équipotentialité entre l’entraînement et l’ar-
moire de commande.
Les câbles de puissance développant des courants parasites sont principalement
de type
• câbles de sortie des variateurs électroniques, des démarreurs et des dispositifs de
freinage
• liaisons vers les résistances de freinage
8.6 Choix du dispositif de protection du frein
Compte tenu d’importantes surcharges accidentelles ou de la commutation d’un
courant continu sur une charge inductive, il convient d’utiliser, pour la
commande de l’alimentation du frein, des contacteurs pour courant continu
spéciaux.
La sélection du contacteur-frein pour fonctionnement sur réseau est relativement
simple.
• En cas d’alimentation DC 24 V, prévoir un contacteur pour service DC3.
A condition que les spécifications pour un pilotage direct du frein soient respectées, il
est également possible de piloter un frein BP directement depuis la sortie frein d’un ser-
vovariateur MOVIAXIS®.
Cependant, les freins des moteurs CMP80 et CMP100 ne peuvent en principe pas être
raccordés directement sur un MOVIAXIS®. Pour plus d’informations, consulter le ma-
nuel système Servovariateurs multi-axes MOVIAXIS®.
 6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
1
/
37
100%