Mesure et modèles en psychologie Nouvelles orientations

Mesure et modèles en psychologie
Nouvelles orientations concernant
l’intégration multi-sensorielle
Mesure et modèles en psychologie
Yann Coello
http://perso.univ-lille3.fr/~ycoello/
Mesure en psychologie
Mesure en psychologie
Hormis lorsqu’elle s’appuie sur l’entretien, la
psychologie (scientifique) est la science de la mesure et de
l’interprétation des données numériques (c’est vrai pour toutes
les orientations de la psychologie).
La mesure est le fait d'attribuer des nombres à des objets
ou à des événements, en suivant une règle rigoureuse. Le
système numérique est un modèle comprenant plusieurs sortes
de règles. Il y a donc différentes sortes de mesure.
- Classification périodique (échelle nominale)
- Transformation monotone croissante (échelle ordinale)
- Transformation affine (régulière, linéaire) (échelle numérique)
Mesure en psychologie
Mesure en psychologie
Invariants inter-individuels
(notion de groupe)
Comparaison inter groupes
(appariés ou indépendants)
Statistiques
Mesure en psychologie
Mesure en psychologie
Invariants inter-individuels
(notion de groupe)
Variations inter-individuelles
(étude de cas)
Comparaison d’un individu
par rapport à un groupe-norme
Psychométrie
Mesure en psychologie
Mesure en psychologie
La mesure sera possible quand il y aura isomorphisme
entre les relations empiriques des faits étudiés et les relations
formelles des nombres. A cette condition, les secondes servent
de modèle pour les premières.
L’analyse numérique sert de support à l’étude des mécanismes
cognitifs et cérébraux sous-tendant les comportements
adaptés.

Le système nerveux central est une architecture de neurones dont
l’activité est essentiellement :
(1) d’ordonner les connections en entrée et en sortie dans des aires de
traitement spécifiques (modality-specific areas);
(2) Mise en relation d’informations par le biais de connections
cortico-cortical intra et inter-modalitaires;
(3) l’apprentissage de corrélations.
Conséquence:
1. On peut s’attendre à ce que les aires cérébrales s’intéressant aux
même stimuli soient interconnectées (traitement multi-modalitaire).
2. Les objectifs de cette connection est d’augmenter les capacités de
traitement mais aussi de minimiser la variabilité dans les traitements
effectués.
Un des principes du fonctionnement neurologique et cognitif :
Minimiser la variabilité dans les traitements effectués.
Statistiquement, cela revient à essayer d’augmenter la vraisemblance
des traitements effectués. Un modèle comportemental peut donc
s’expliquer par un modèle mathématique.
Un modèle comportemental s’appuyant sur un modèle mathématique:
Idée nouvelle: le système nerveux central fonctionne comme
estimateur de maximum de vraisemblance.
Le cerveau comme estimateur de
maximum de vraisemblance
L’exemple du traitement multi-sensoriel de la taille
Système
visuel
Système
haptique
Taille ?

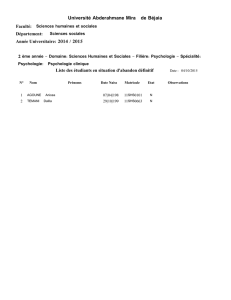
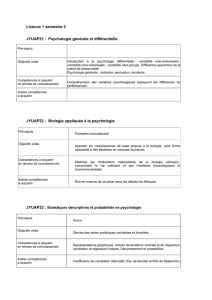
The participant sat at a table, with a mirror positioned vertically in the center, and an occluding platform to the
participant’s right. The participant’s right hand was placed by the experimenter on one of the four hand positions marked
on the table. The right arm and hand were never visible to the participant during the experiment, whereas the left arm
was visible directly via the mirror reflection in the mirror condition. When the right hand was positioned 12 cm to the
right of the mirror, the mirror reflection of the left hand appeared to be in the same position as the true location of the
right hand (as is shown in the figure; solid and broken white lines show the approximate line of sight, via the mirror
reflection, of the left hand).
In all other right-hand positions (5, 19, and 26 cm), the apparent visual appearance of the right hand (really the
mirror-reflected left hand) was mismatched with respect to the true position of the right hand.
After tapping the fingers of both hands synchronously and experiencing the mirror illusion (the feeling that one can see
through the mirror to observe one’s right hand directly), the participant reached with his or her right index finger to the
position on the table where he or she judged the target position indicator line would meet the table (i.e., 12 cm to the right
of the mirror and 45 cm in front of the participant).
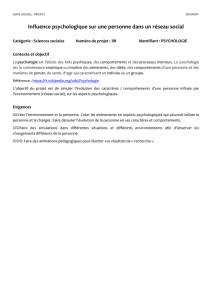
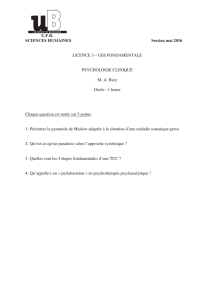
We believe the most appropriate explanation to involve the effect of conflicting visual
information concerning the (apparent) position of the right hand on subsequent
reaching movements made with that hand. This effect is a form of visual capture of
initial hand position in the mirror.
42%
42%
30%

Reaching error was an average of 30%–42% of the difference between initial left- and
right-hand positions. The visual modality was only one source of limb position
information. All the other cues combined (proprioceptive, somatosensory, and
auditory cues, plus any “higher,” cognitive influences might also have limited the
effect of the conflicting visual information concerning hand position.
Notion de capture sensorielle = notion insatisfaisante
1. Existance d’intégration multimodale au niveau neurophysiologique
(neurones multimodaux)
2. Découverte de loi statistiques montrant la supériorité de l’intégration multimodale
(cerveau = intégrateur de maximum de vraisemblance (minimisation de la variance))
Bimodal neurons
- Zone polysensorielle (cortex prémoteur) déclenche des comportements d’évitement en
cas de stimulation visuelle ou tactile.
- Champ récepteur visuel < 20cm, réagit au mouvement avec préférence directionnelle
- Champ récepteur tactile réagit au contact
- Déclenche des sursauts et mouvements de défense
Système
visuel
Système
haptique
Taille ?
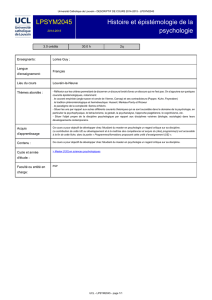
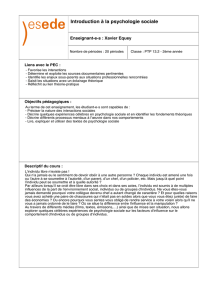
Probabilité
Vision
Sv
Estimation de la taille
Probabilité
Taille objet
Haptique
Sh
Taille objet
!v
!h
Pour chaque modalité
Loi normale
Probabilité
Vision
Sv
Estimation de la taille
Probabilité
Taille objet
Haptique
Sh
Taille objet
!v
!h
Pour chaque modalité
Equivalence des modalités
Ou
(choix uni-modalitaire)
Déterminer la taille :

Probabilité
Vision
Sv
Estimation de la taille
Probabilité
Taille objet
Haptique
Sh
Taille objet
!v
!h
Pour chaque modalité
Equivalence des modalités
Déterminer la taille :
Et
(choix multi-modalitaire)
Probabilité
Vision
Sv
Estimation de la taille
Probabilité
Taille objet
Haptique
Sh
Taille objet
!v
!h
Pour chaque modalité
Equivalence des modalités :
Svh = (# Si) / ki
!vh ! (# !i) / ki
^
Probabilité
Vision
Sv
Estimation de la taille
Probabilité
Taille objet
Haptique
Sh
Taille objet
!v
!h
Pour chaque modalité
Equivalence des modalités :
!2vh =!2v !2h
!2v + !2h
<!2v = !2h
0
0,01
0,02
0,03
0,04
0,05
0,06
1 11 21 31 41 51 61 71 81 91
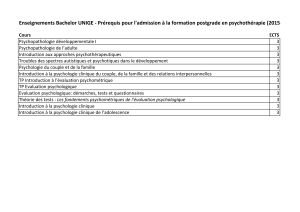
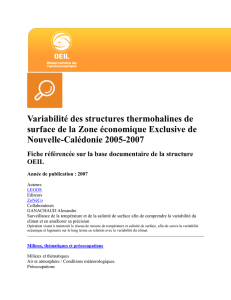
Exemple :
"
(40,10)
"
(40,10)
Vision / haptique
"
(40,7.07)
Vision + haptique
Svh = (# Si) / ki = 40
^
0
0,01
0,02
0,03
0,04
0,05
0,06
1 11 21 31 41 51 61 71 81 91
Exemple :
"
(40,10)
"
(40,10)
Vision / haptique
"
(40,7.07)
Vision + haptique
!2vh =!2v !2h
!2v + !2h
= 102 102
102 + 102 = 50
V !2vh = 7,07
Conclusion :
Avantage de l’intégration multi sensorielle
 6
7
8
9
10
11
12
13
14
15
6
7
8
9
10
11
12
13
14
15
1
/
15
100%